We develop advanced technologies in robotics, mechatronics, and sensing to create interactive, dynamic physical 3D displays and haptic interfaces that allow 3D information to be touched as well as seen. We are specifically interested in using these novel interfaces to support richer remote collaboration, computer aided design, education, and interfaces for people with visual impairments. In pursuit of these goals, we use a design process grounded in iterative prototyping and human centered design and look to create new understanding about human perception and interaction through controlled studies.
Our research in Human Computer Interaction and Human Robot Interaction currently directed in six areas:
- Modeling and Applying Visuo-Haptic Illusions and Multimodal Haptics
- Dissipative Haptic Devices
- Accessible STEM Education Through Haptic and Multimodal Interaction
- Interaction and Display with Swarm User Interfaces
- Shape Changing Robots and Displays
- Design Tools
Shape-shifting Tech Will Change Work As We Know It
See a video of our vision!
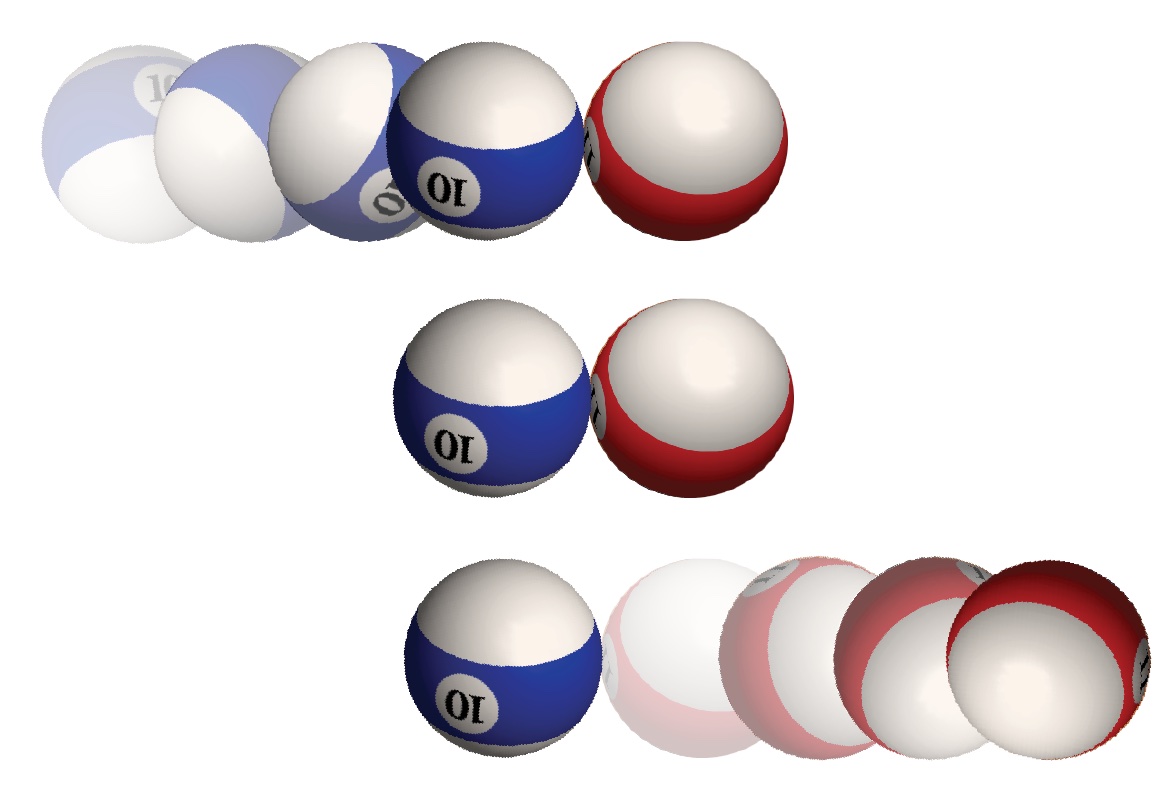
Realism in Phenomenal Causality
The role of realism across multisensory cues within causal perception
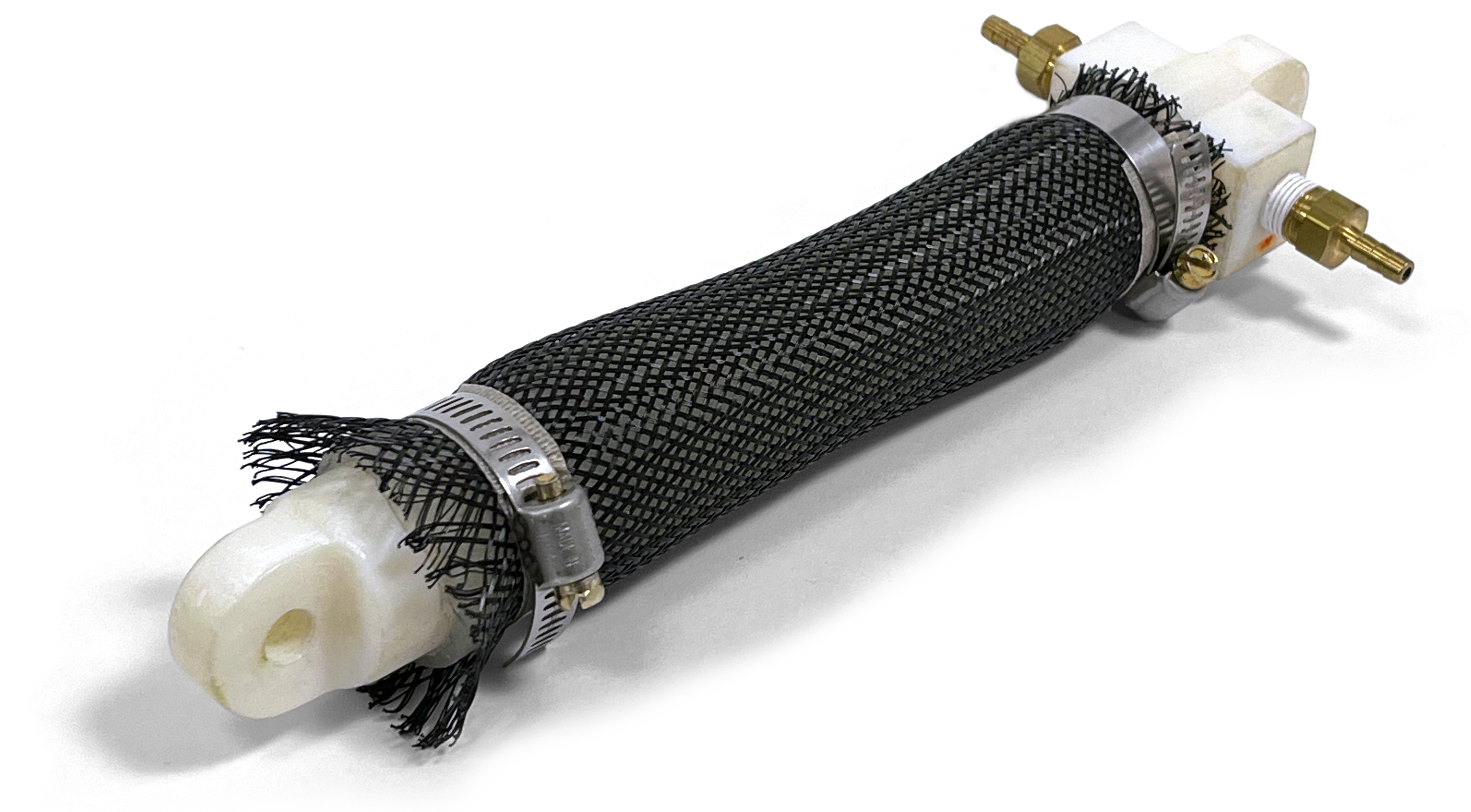
An All-Soft Variable Impedance Actuator Enabled by Embedded Layer Jamming
A multifunctional soft artificial muscle
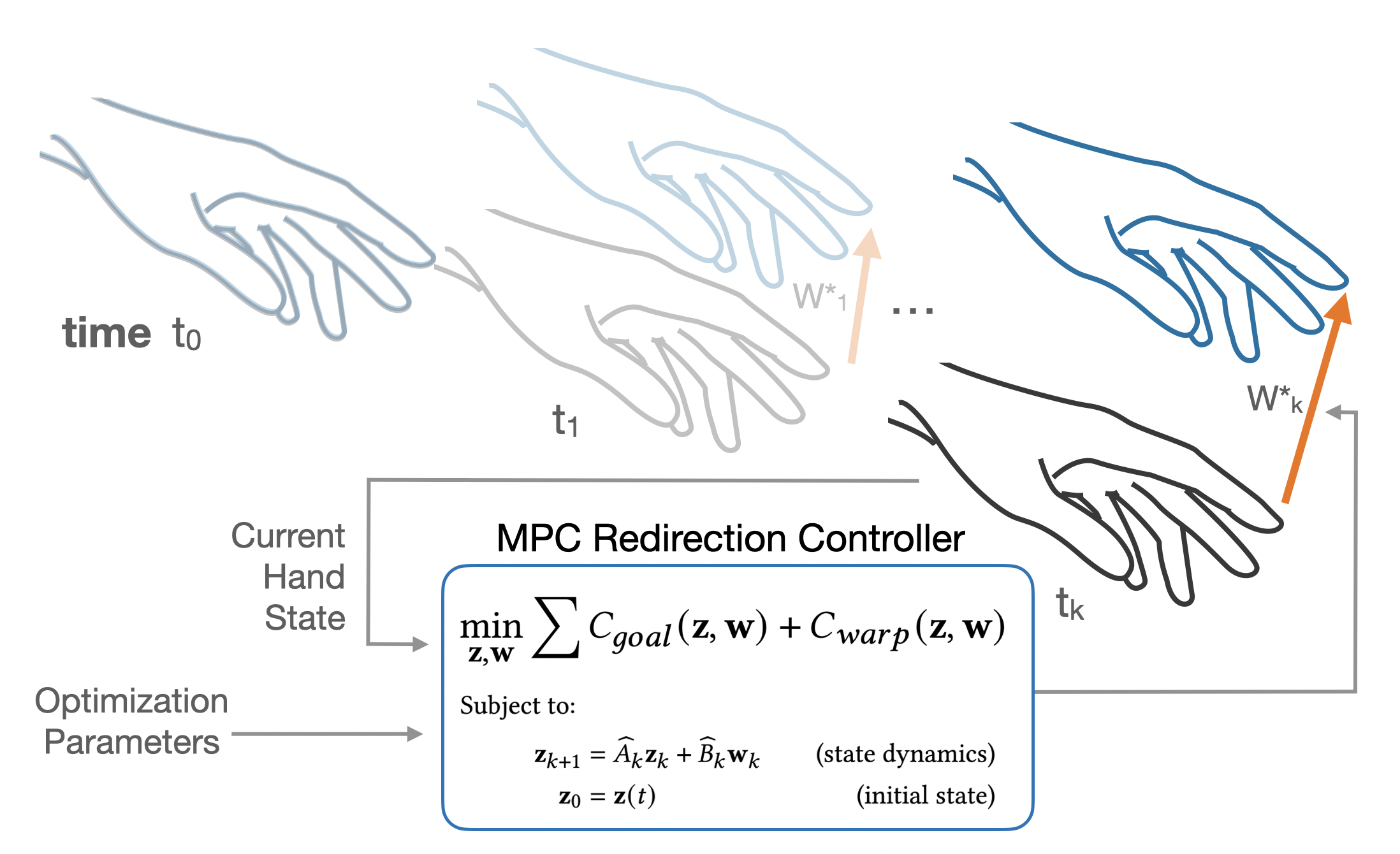
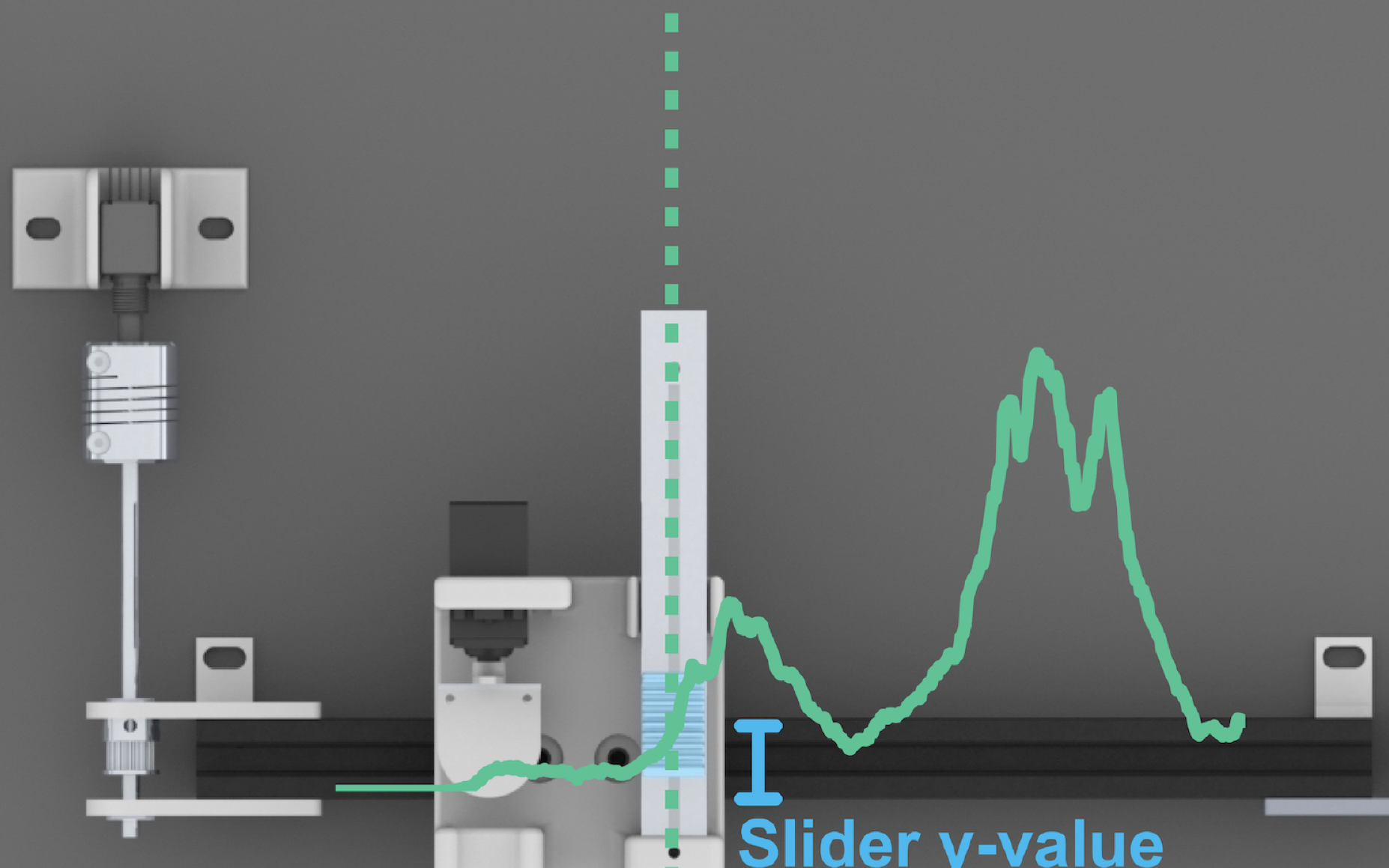
MPC for Reach Redirection
Real-time VR spatial remapping using human sensorimotor models
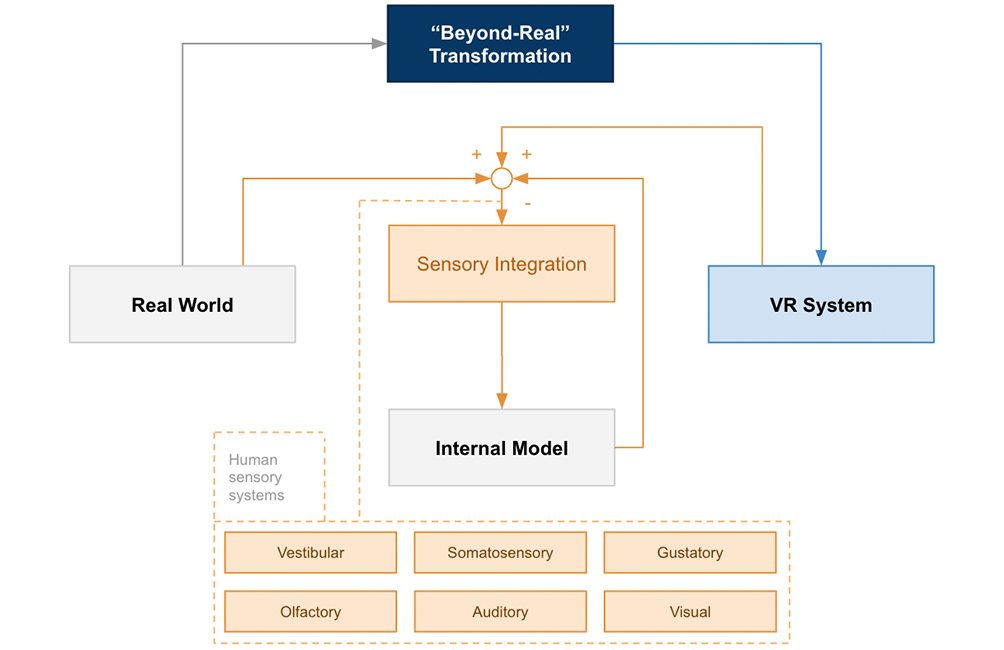
Beyond Being Real
A Sensorimotor Control Perspective on Interactions in Virtual Reality
Slide-tone and Tilt-tone
1-DOF Haptic Techniques for Conveying Shape Characteristics of Graphs to Blind Users
Automated Accessory Rigs
for Layered 2D Character Illustrations
A Causal Feeling
How Kinesthetic Haptics Affects Causal Perception
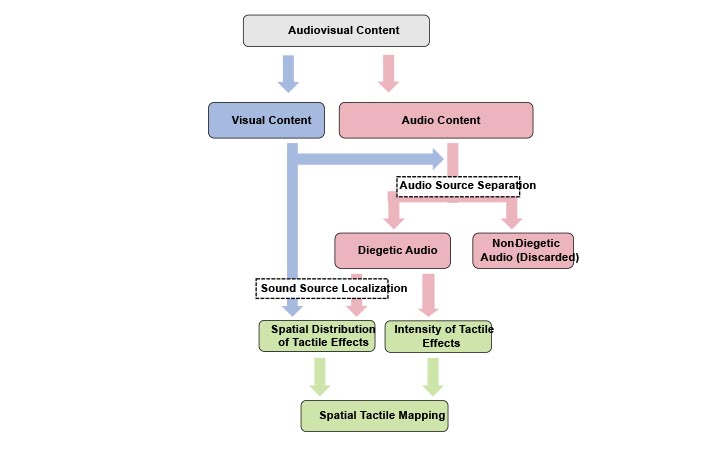
Auto Haptics
Creating spatial tactile effects automatically by analyzing cross-modality features of a video
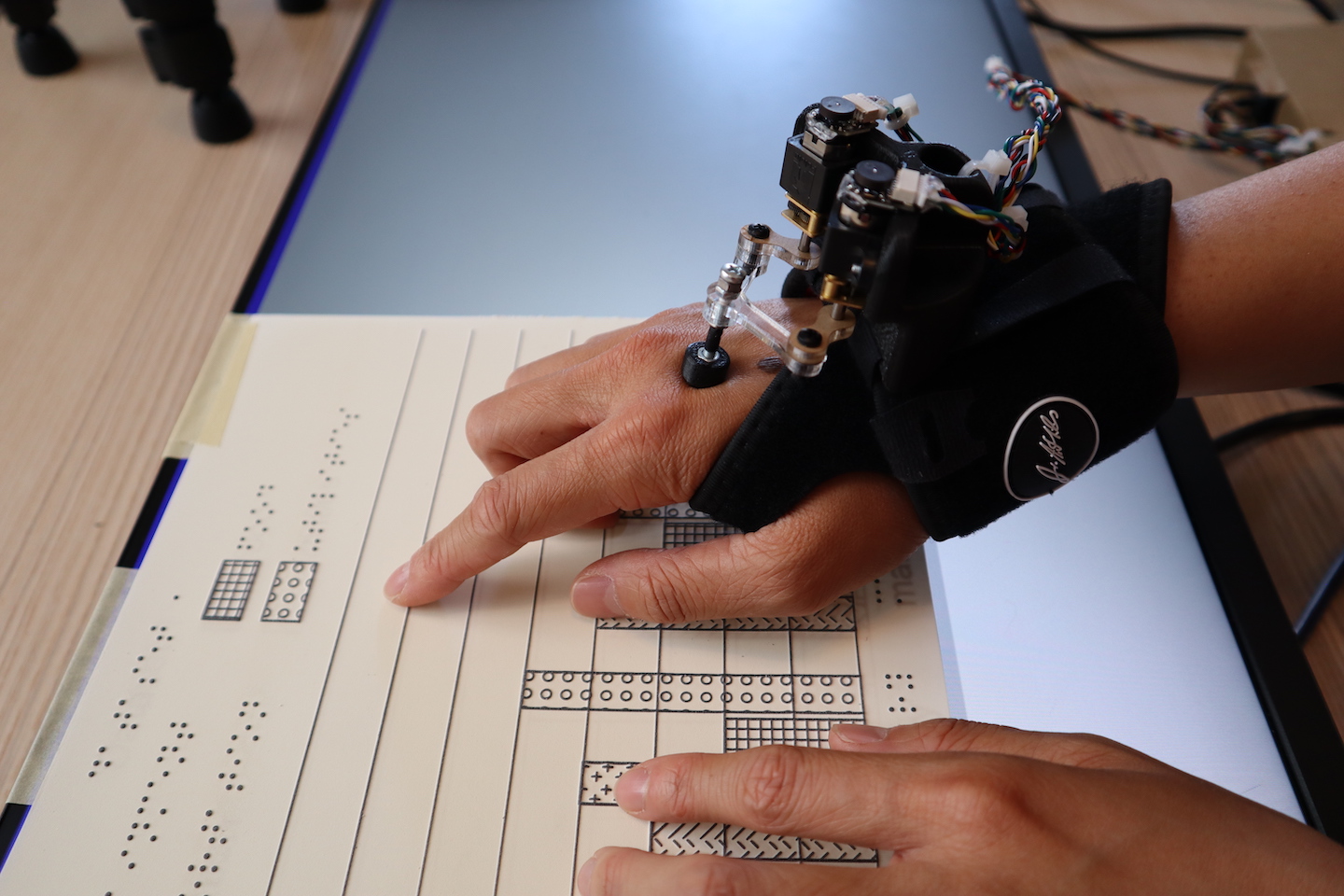
PantoGuide
A Haptic and Audio Guidance System To Support Tactile Graphics Exploration
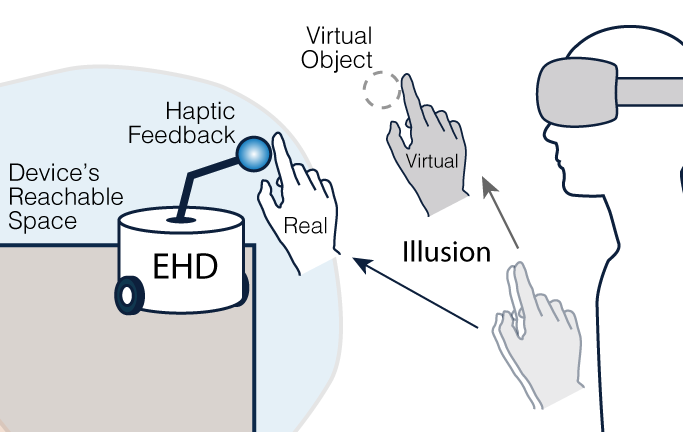
REACH+
Extending the Limits of Haptic Mobile Robots with Redirection in VR
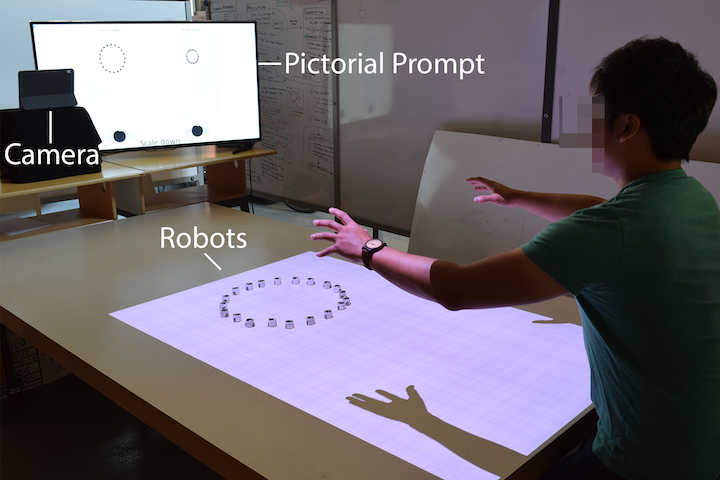
Swarm Control
User-defined Swarm Robot Control
Transient Vibration + Visuo Haptic Illusions
Augmenting Perceived Softness of Haptic Proxy Objects
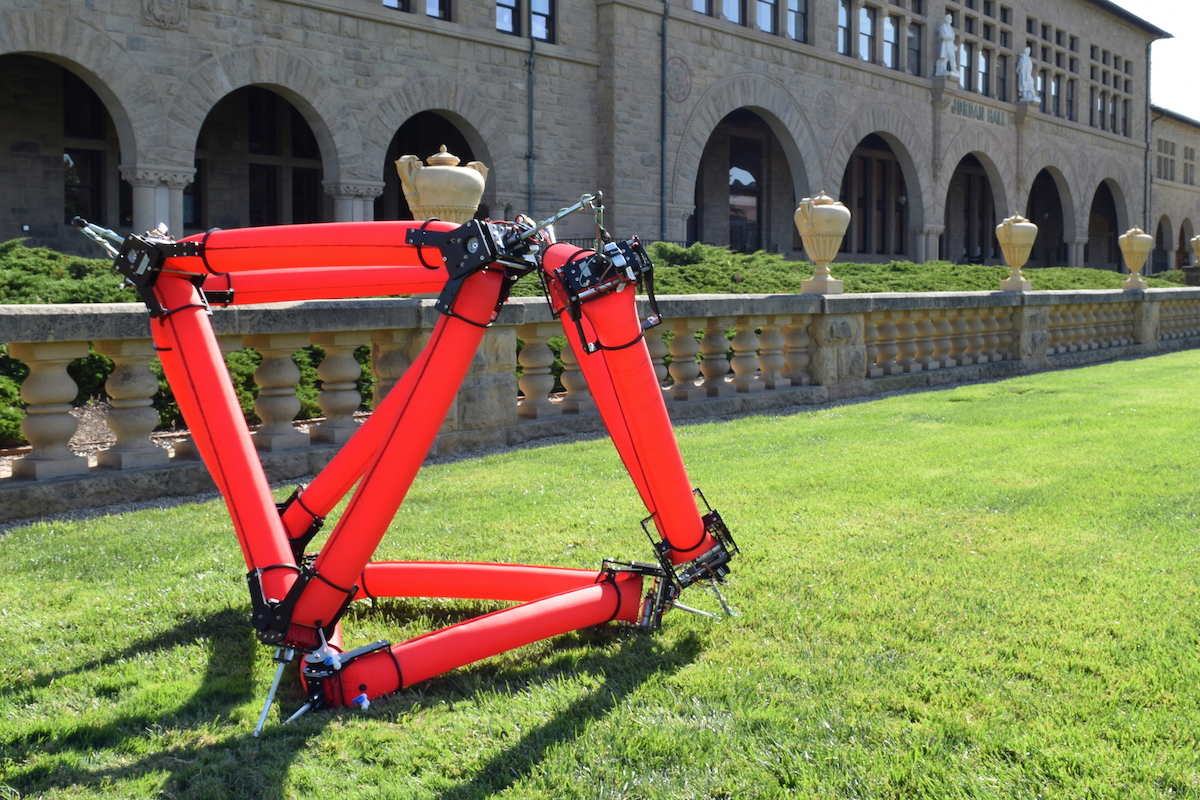
An untethered isoperimetric soft robot
Shape changing truss robots that crawl and engulf.
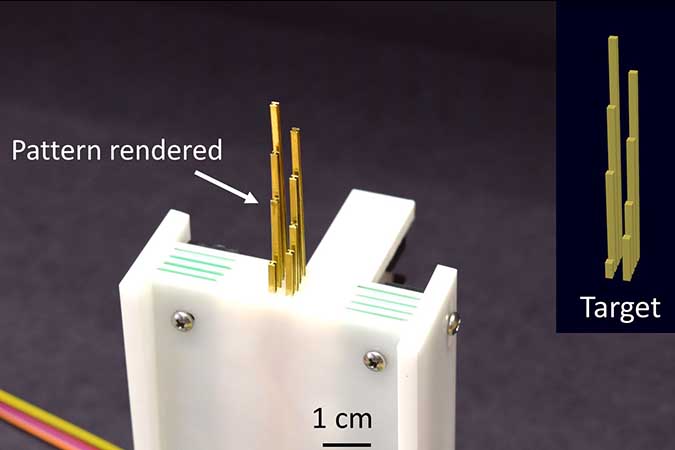
Electrostatic Adhesive Brakes
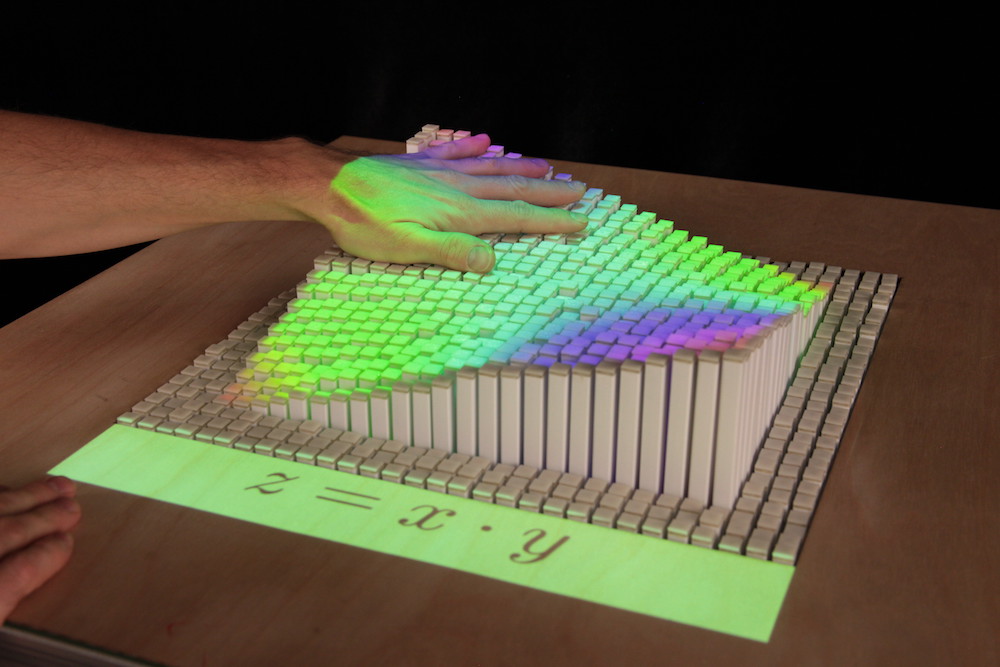
Towards High Spatial Resolution Refreshable 2.5D Tactile Shape Displays
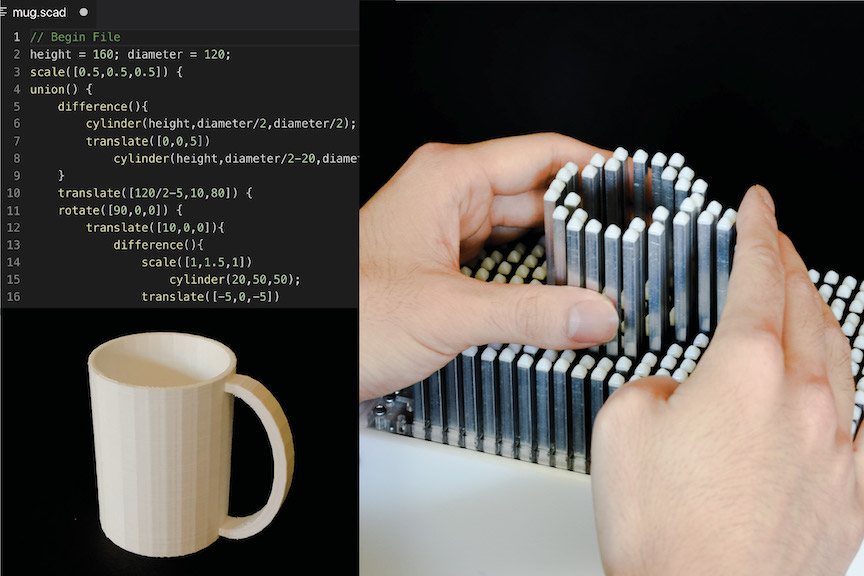
shapeCAD
An Accessible 3D Modelling Workflow for the Blind and Visually-Impaired Via 2.5D Shape Displays
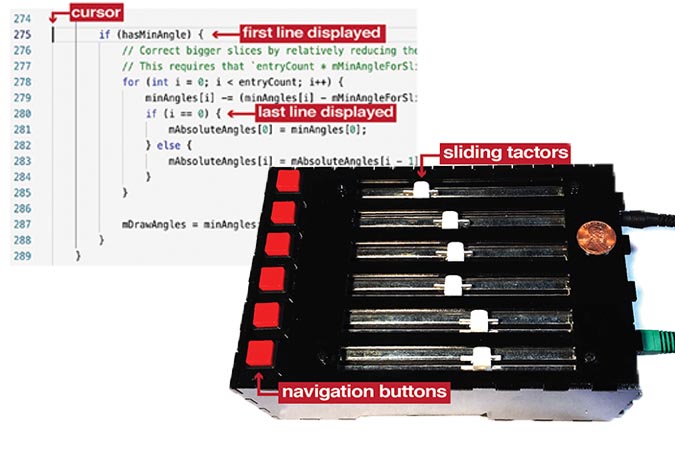
Tactile Code Skimmer
A Tool to Help Blind Programmers Feel the Structure of Code
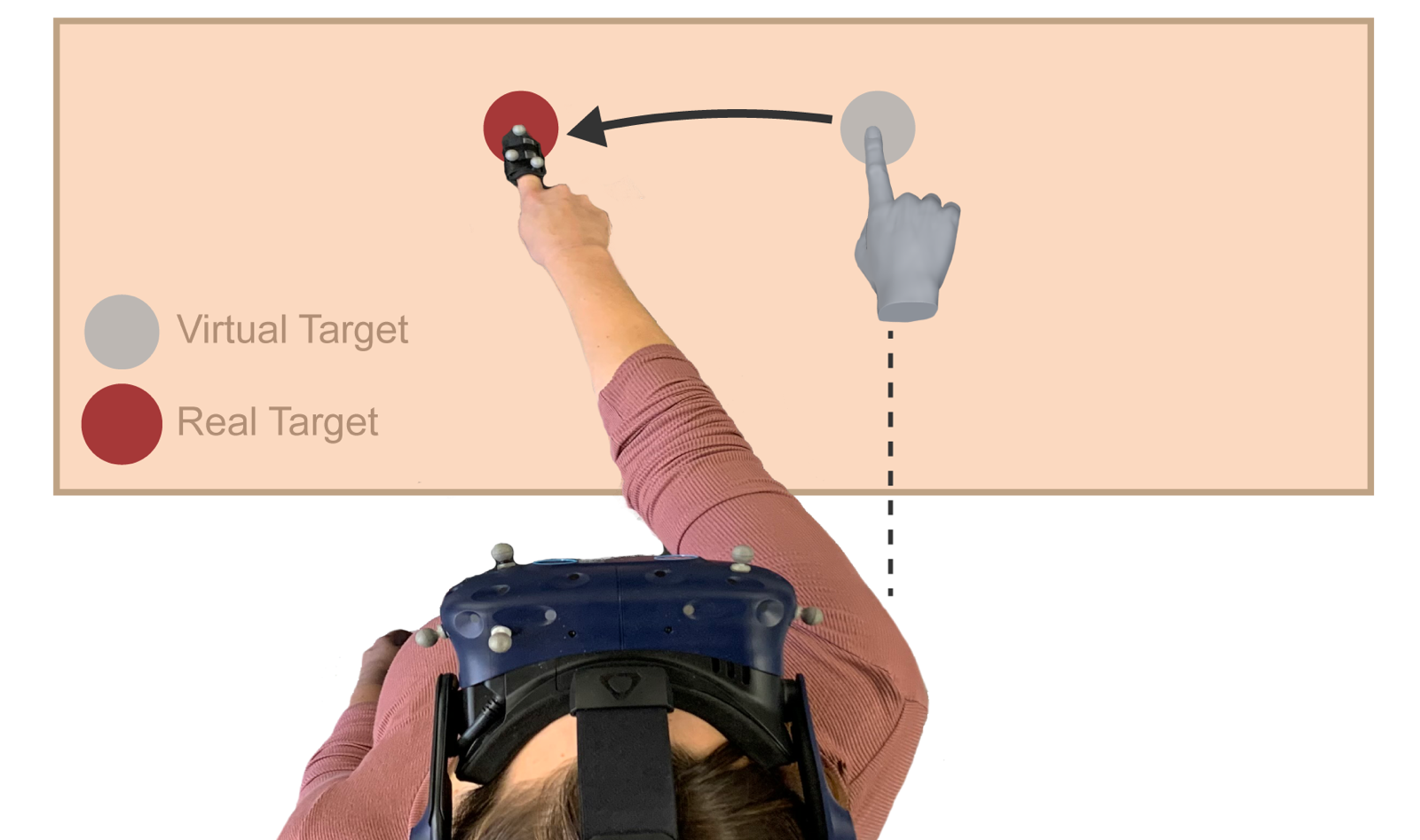
Understanding Redirected Touch In Virtual Reality
Augmenting haptic interaction in VR through perceptual illusions.
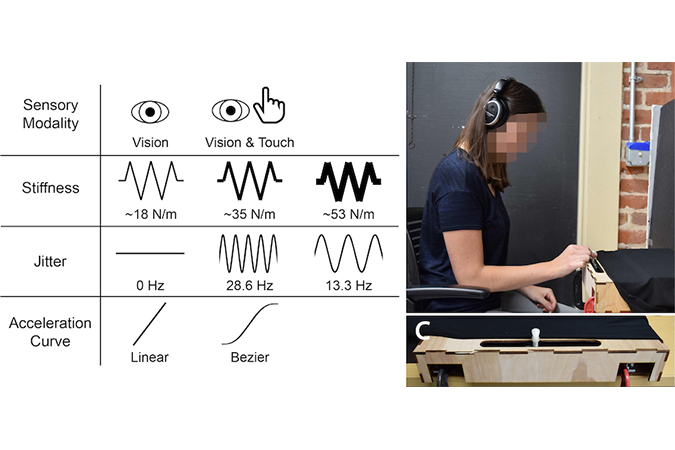
Visual and Haptic Perception of Expressive 1 DoF Motion
Understanding user perception of expressive robotic motion through different sensory modalities

Hover Haptics
Using Quadcopters to Appropriate Objects and the Environment for Haptics in Virtual Reality

SwarmHaptics
Haptic Display with Swarm Robots
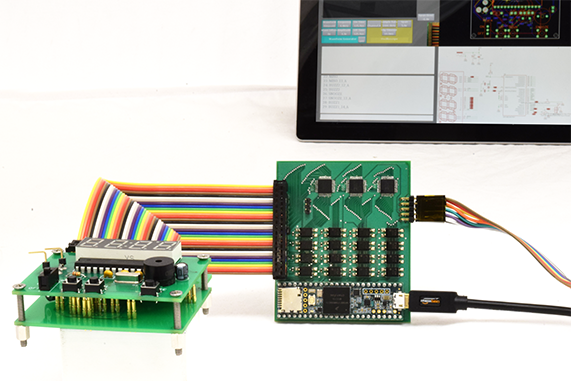
Pinpoint
Automated Instrumentation for In-Circuit PCB Debugging with Dynamic Component Isolation
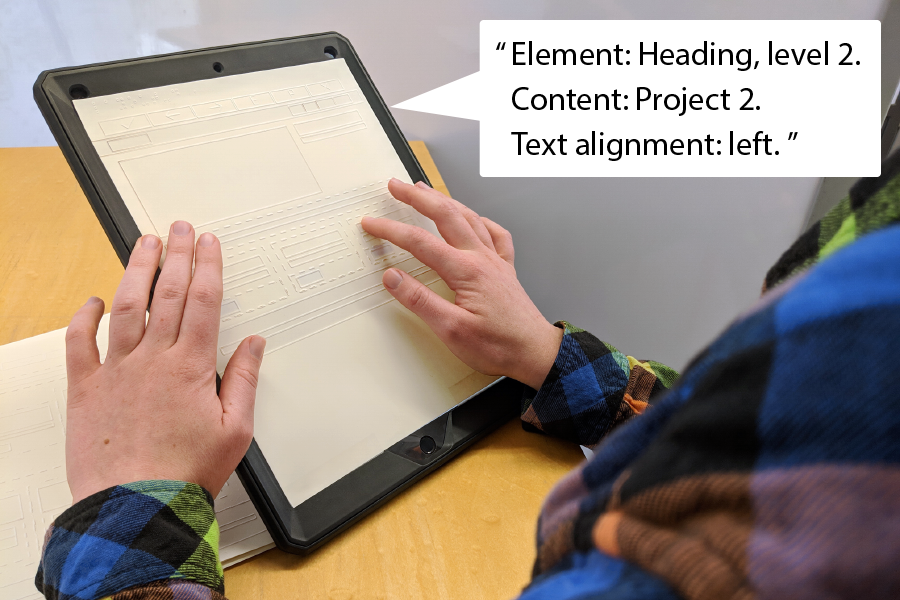
Editing Spatial Layouts through Tactile Templates
Editing Spatial Layouts through Tactile Templates for People with Visual Impairments

Dynamic Composite Data Physicalization
Physical visualizations that use collections of self-propelled objects to represent data
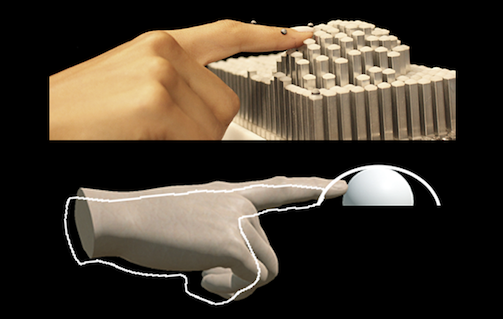
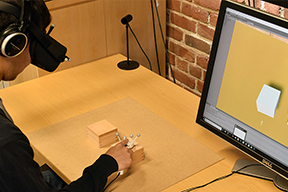
Visuo-Haptic Illusions
Visuo-Haptic Illusions for Improving the Perceived Performance of Shape Displays
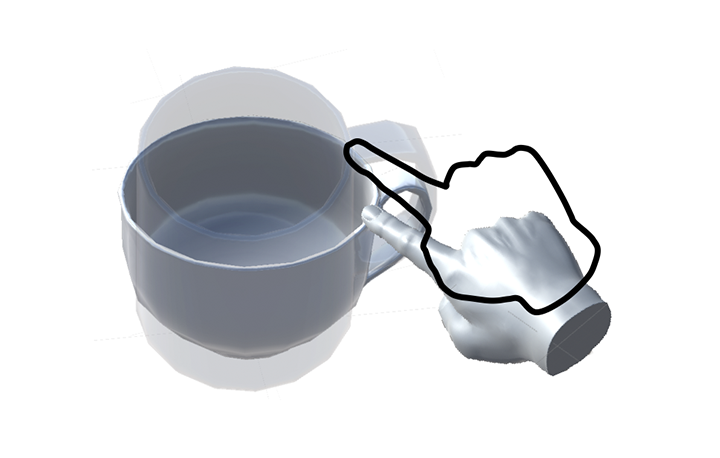
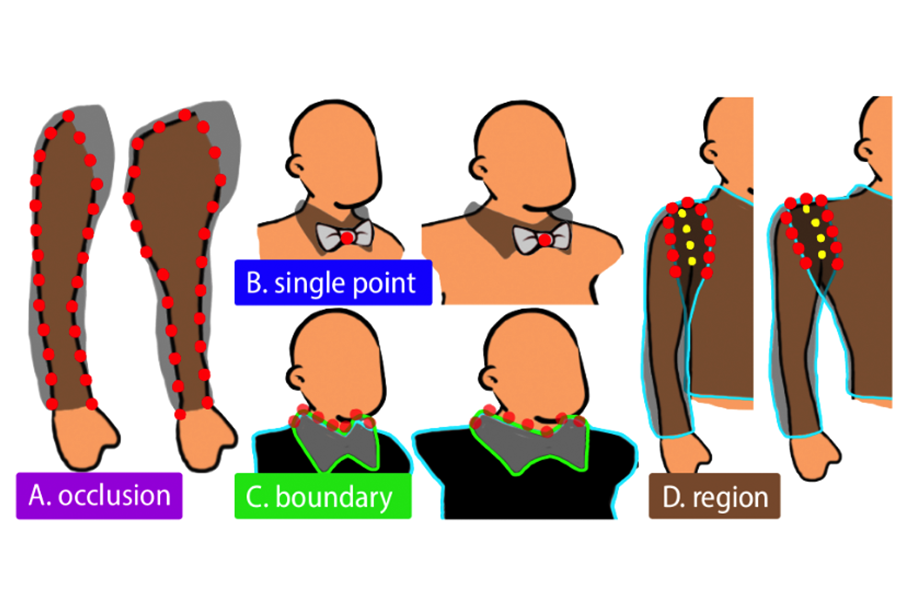
3D Retargeted Touch in Haptics VR
A Functional Optimization Based Approach for Continuous 3D Retargeted Touch of Arbitrary, Complex Boundaries in Haptic Virtual Reality
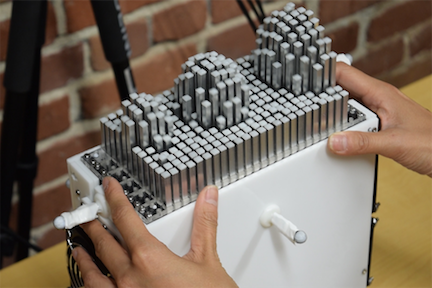
shapeShift
A Mobile Tabletop Shape Display for Tangible and Haptic Interaction
Robotic Assembly
Robotic Assembly of Haptic Proxy Objects for Tangible Interaction and Virtual Reality
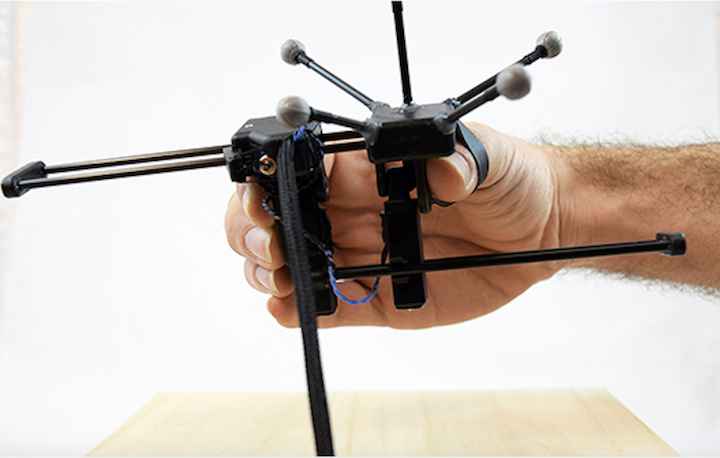
grabity
A Wearable Haptic Interface for Simulating Weight and Grasping in Virtual Reality
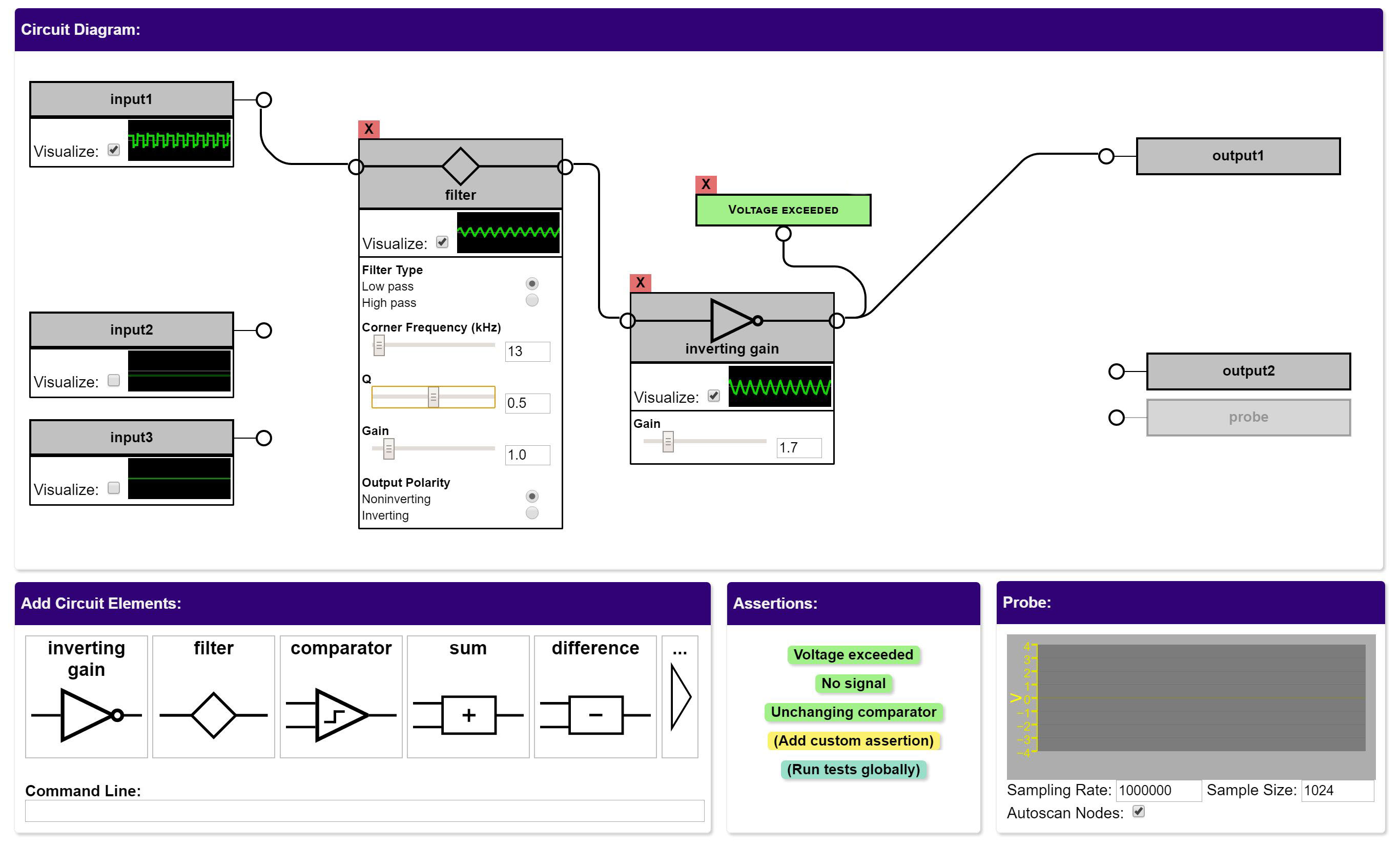
Scanalog
Interactive Design and Debugging of Analog Circuits with Programmable Hardware


UbiSwarm
Ubiquitous Robotic Interfaces and Investigation of Abstract motion as a Display.
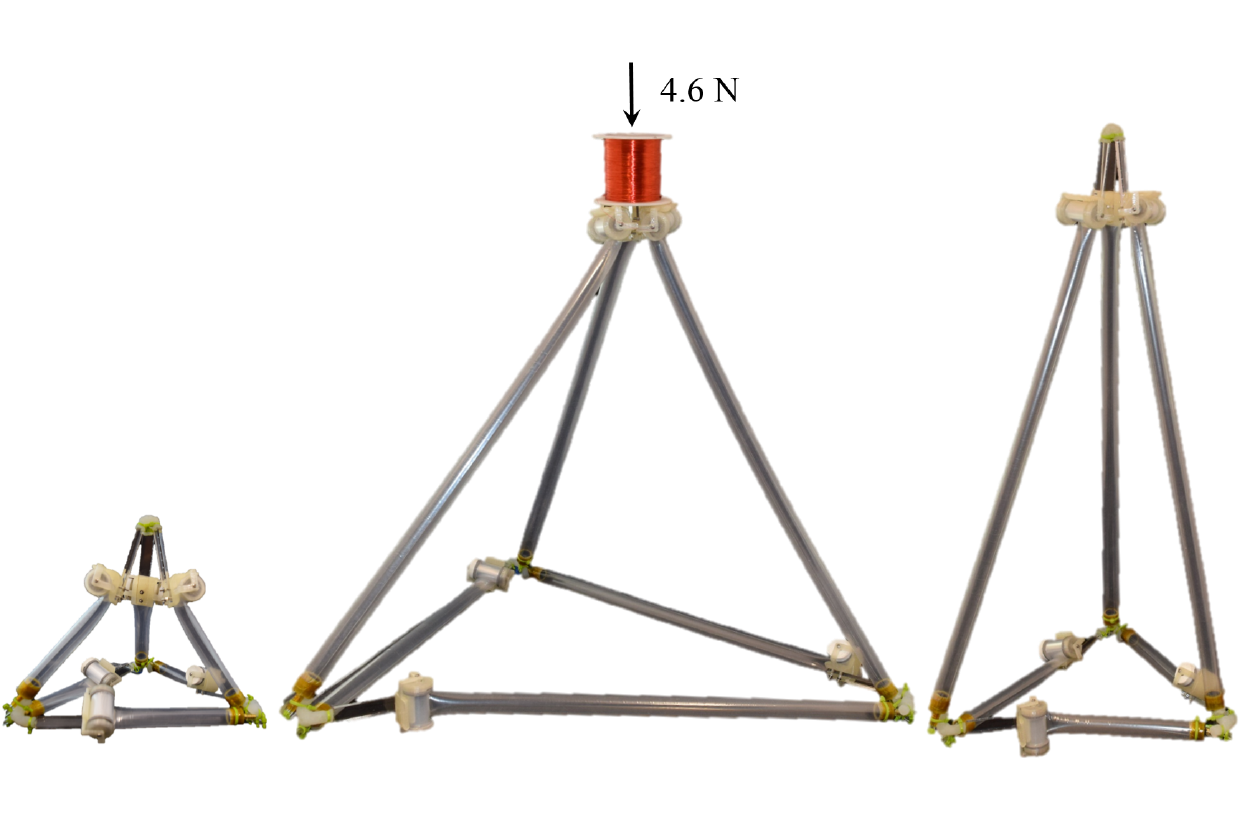
Pneumatic Reel Actuator
High extension pneumatic actuator.
shiftIO
Reconfigurable Tactile Elements for dynamic physical controls.

Zooids
Building block for swarm user interface

Wolverine
A wearable haptic interface for grasping in virtual reality.

Rovables
Miniature on-body robots as mobile wearables

Switchable Permanent Magnetic Actuators
Applications in shape change and tactile display

Haptic Edge Display
Display for mobile tactile interaction.