- Stanford University Mechanical Engineering, 2. University of Victoria and City, University of London, 3. Inria
We introduce dynamic composite physicalizations, a new class of physical visualizations that use collections of self-propelled objects to represent data. Dynamic composite physicalizations can be used both to give physical form to well-known interactive visualization techniques, and to explore new visualizations and interaction paradigms. In this work, we first propose a design space characterizing composite physicalizations based on previous work in the fields of Information Visualization and Human Computer Interaction. We illustrate dynamic composite physicalizations in two scenarios demonstrating potential benefits for collaboration and decision making, as well as new opportunities for physical interaction. We then describe our implementation using wheeled micro-robots capable of locating themselves and sensing user input.

Collaborative data exploration and analysis using a dynamic composite data physicalization.
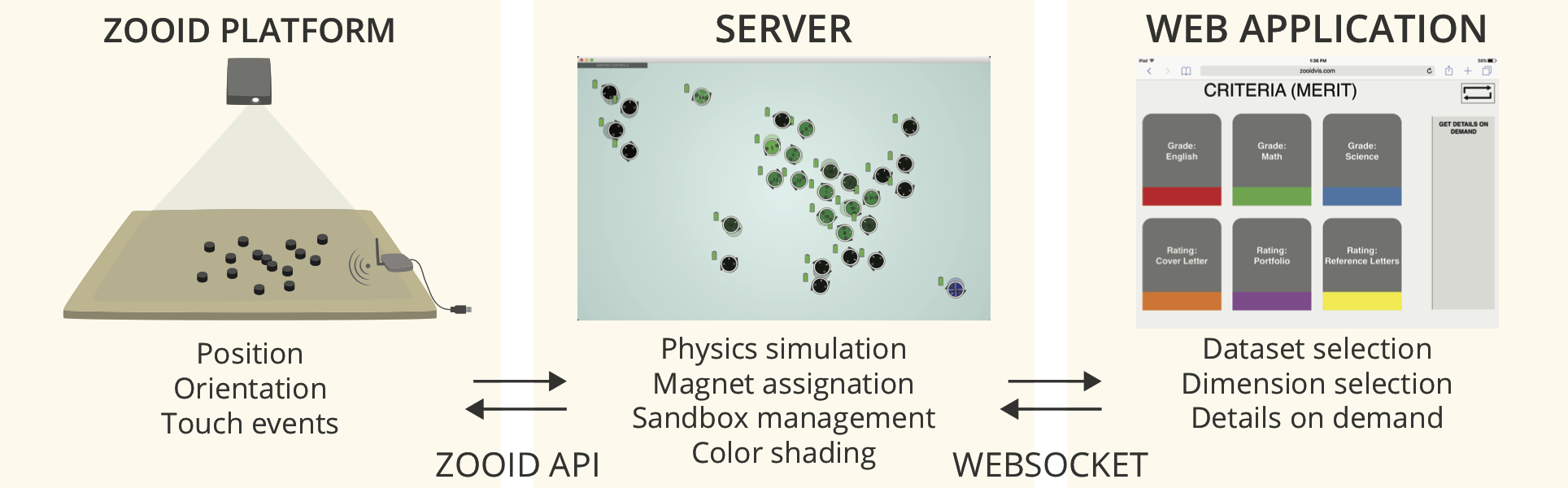
Our implementation extends the original Zooids implementation by adding connectivity to a web server with a generic client architecture. It makes it easy to develop new web applications to interact with Zooids.
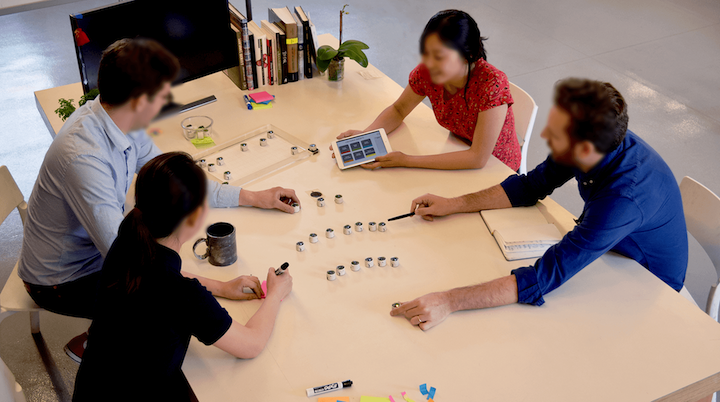
A committee of four faculty members meets to select students for a new summer school program. Each Zooid embodies an applicant.

By placing Lattitude and Longitude magnets in the sandbox, the scatterplot become a map, showing the city of origin of applicants.

A family explores holidays destinations using Zooids.
Github
Source files available here