
Ubiquitous Robotic Interfaces
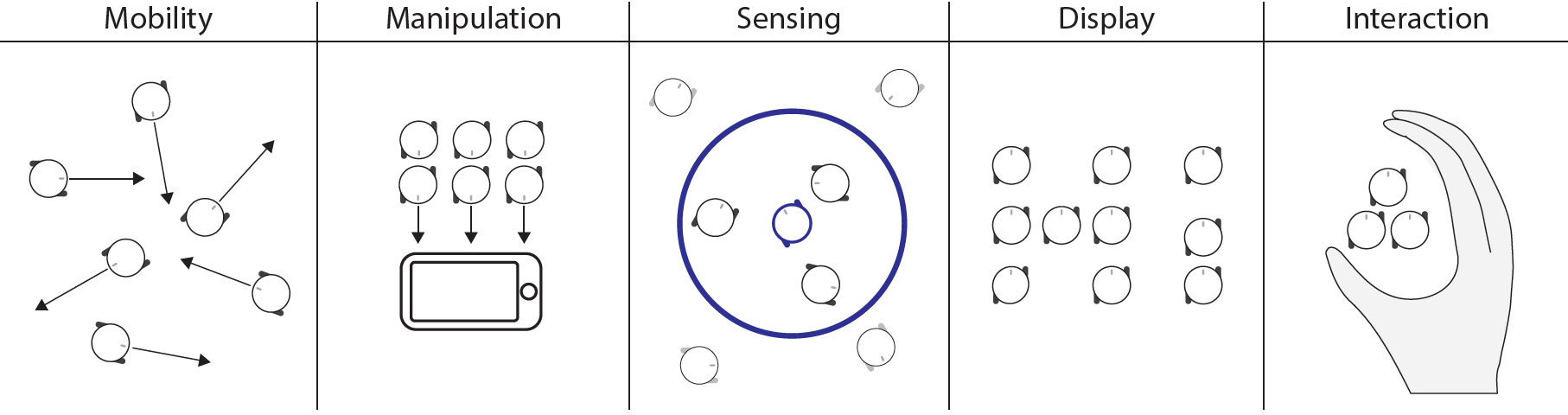
Ubiquitous robotic interfaces (URIs) are composed of many robots and have the following key elements as shown below: Mobility, Manipulation, Sensing, Display and Interaction.
Investigation of Abstract Motion as a Display
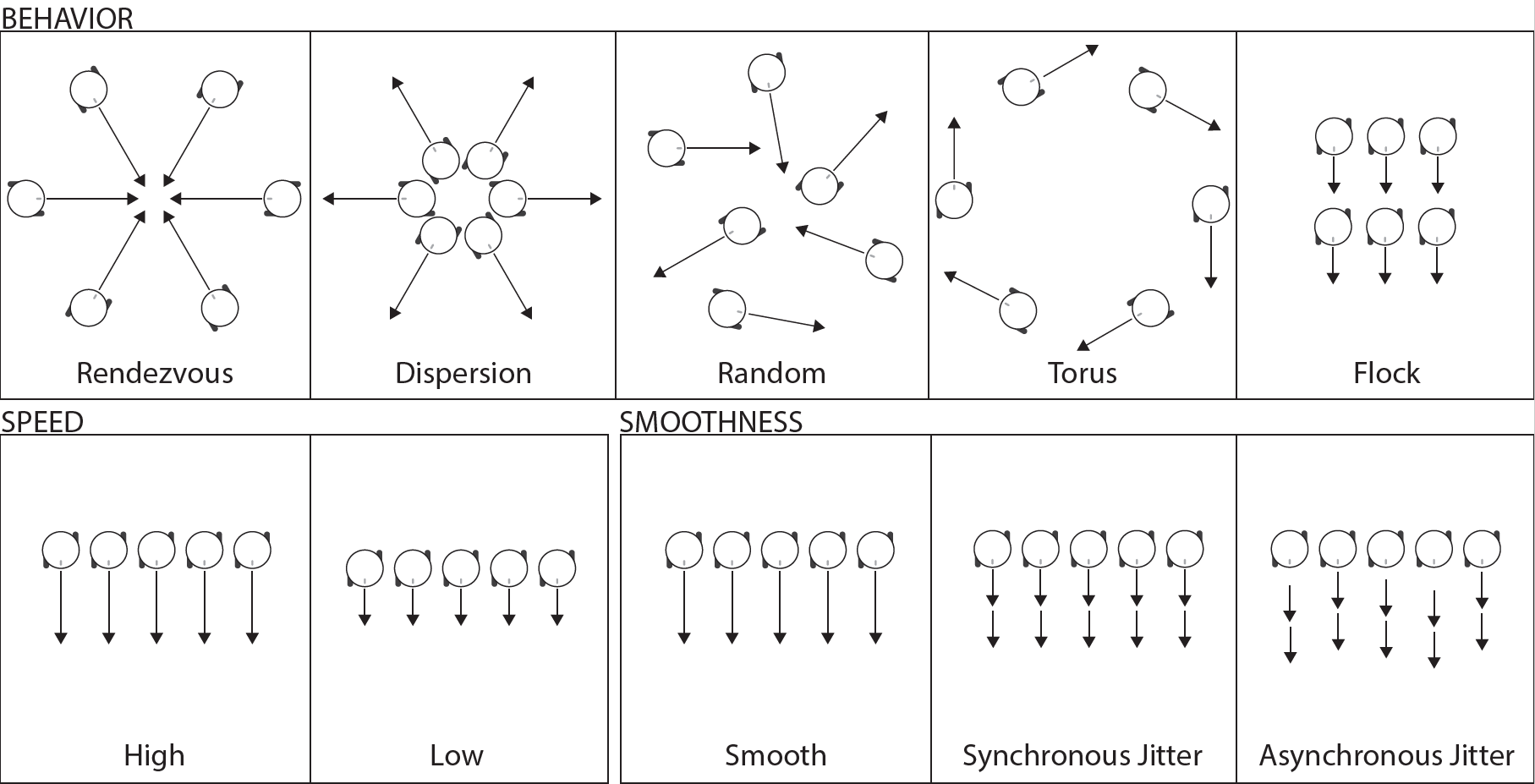
For proper design of URIs, it is necessary to study how people interact and perceive them. In this paper, we first investigated how people perceive abstract multi-robot motion as a display. Through this study, we demonstrate that UbiSwarm, even with fixed form and no body or face, can elicit different perceptions including but not limited to affect and urgency through abstract multi-robot motion. This is done by varying a number of motion parameters: bio-inspired behavior, speed and smoothness. With the study results, we provide both design guidelines for abstract motion and example applications.
Multi-robot Abstract Motion Parameters
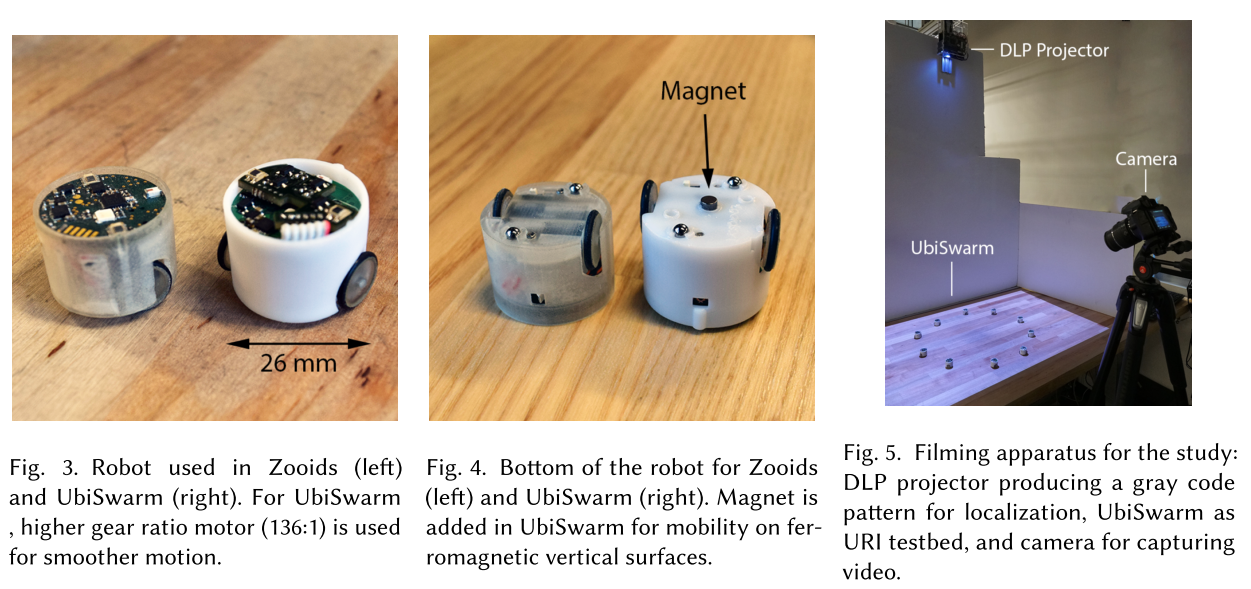
Setup
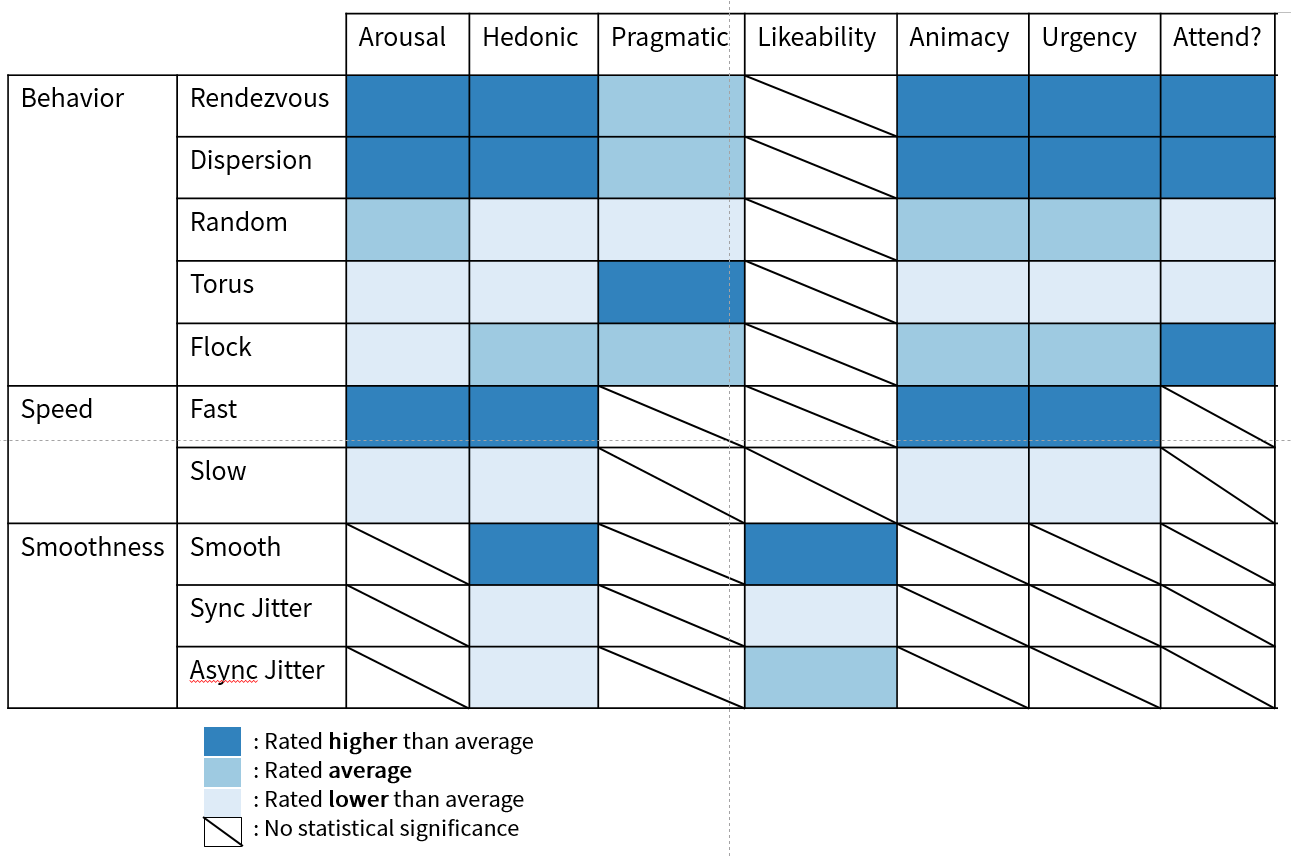
Results
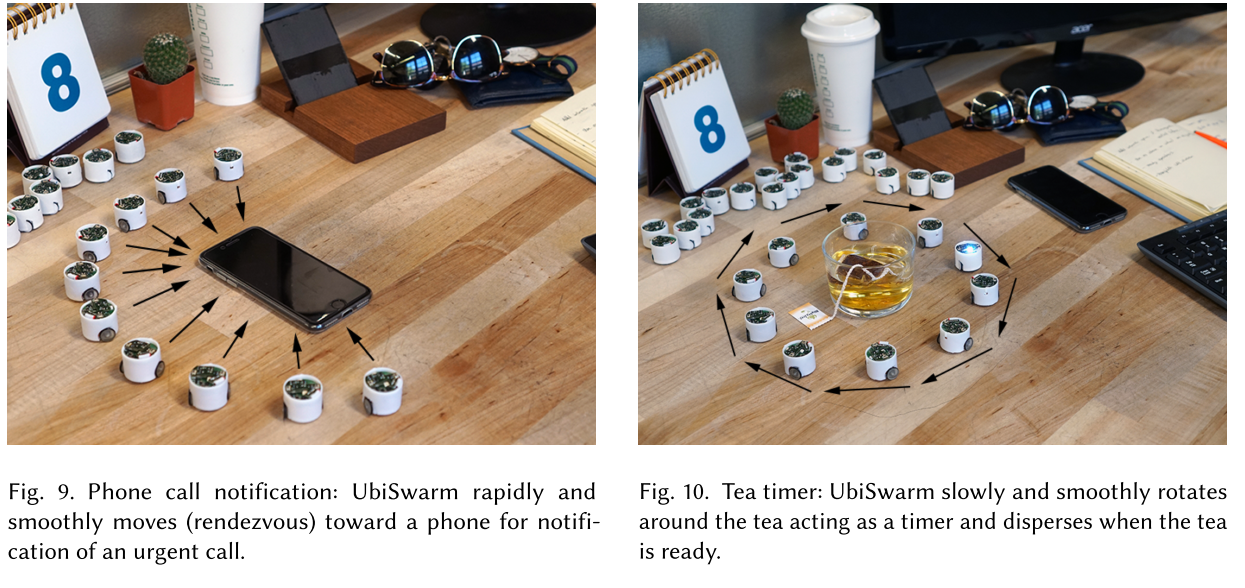
Examples Applications
Video
Papers
- Lawrence H. Kim and Sean Follmer. 2017. UbiSwarm: Ubiquitous Robotic Interfaces and Investigation of Abstract Motion as a Display. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 1, 3, Article 66 (September 2017), 20 pages. DOI: //doi.org/10.1145/3130931
- Griffin Dietz, Jane L. E, Peter Washington, Lawrence H. Kim, and Sean Follmer. 2017. Human Perception of Swarm Robot Motion. In Proceedings of the 2017 CHI Conference Extended Abstracts on Human Factors in Computing Systems (CHI EA ‘17). ACM, New York, NY, USA, 2520-2527. DOI: //doi.org/10.1145/3027063.3053220