1.Stanford University, 2.Oculus Research
While much work has focused on the design of actuators for inputting energy into robotic systems, less work has been dedicated to devices that remove energy in a controlled manner, especially in the field of soft robotics. Such devices have the potential to significantly modulate the dynamics of a system with very low required input power. In this paper, we leverage the concept of layer jamming, previously used for variable stiffness devices, to create a controllable, high force-density, soft layer jamming brake (SLJB). We introduce the design, modeling, and performance analysis of the SLJB and demonstrate variable tensile resisting forces through the regulation of vacuum pressure. Further, we measure and model the tensile force with respect to different layer materials, vacuum pressures, and lengthening velocities, and show its ability to absorb energy during collisions. We hope to apply the SLJB in a number of applications in wearable technology.
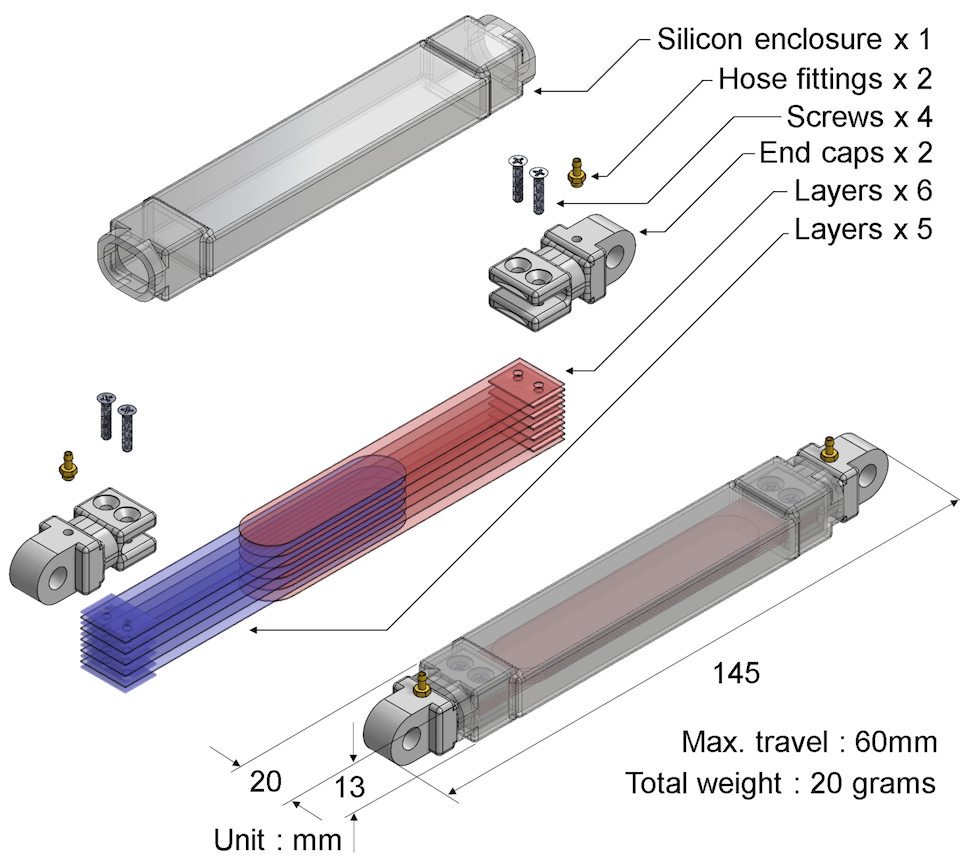
Components and geometry of the SLJB. From top left: 1) Outer housing made from a silicone material. 2) Fasteners and tube fittings that allow for intake and removal of air from the jammer. 3) End caps onto which all other elements are fixtured followed by. 4) Jamming sheets layered together from opposite sides. 5) Full assembly showing how the elements fit together. The number of layers and dimensions can be modified based on the required specifications.
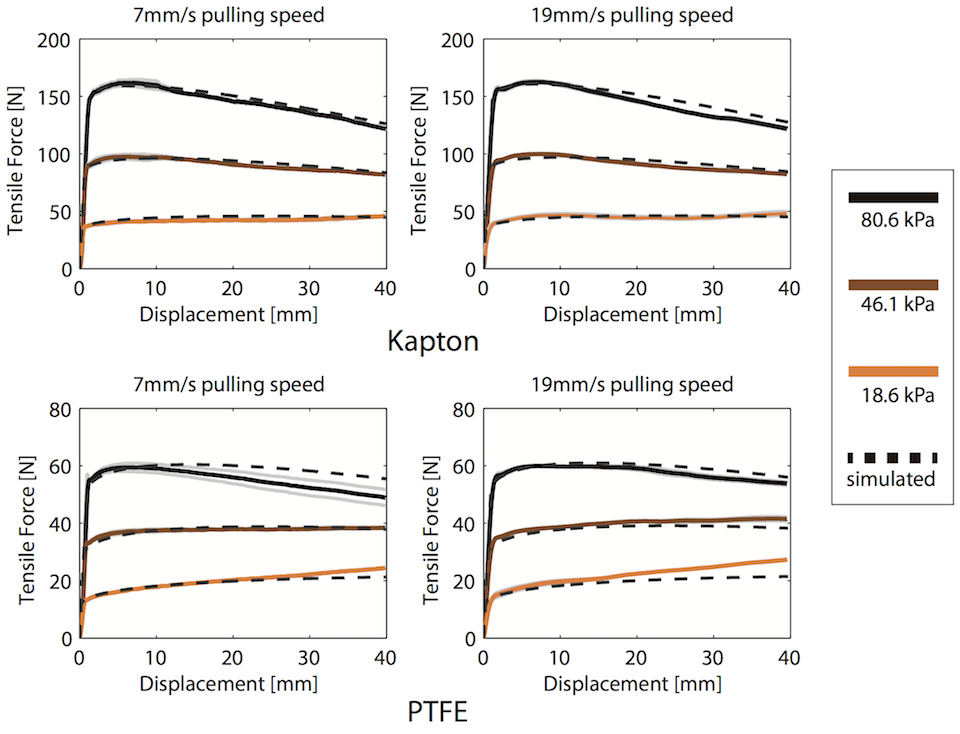
Simulation model validation after considering errors by multiplying the scaling factor a at 80.6, 46.1, 18.6 kPa vacuuming pressures. Light grey lines show one standard deviation error respectively. Dashed lines are corresponding simulation results.
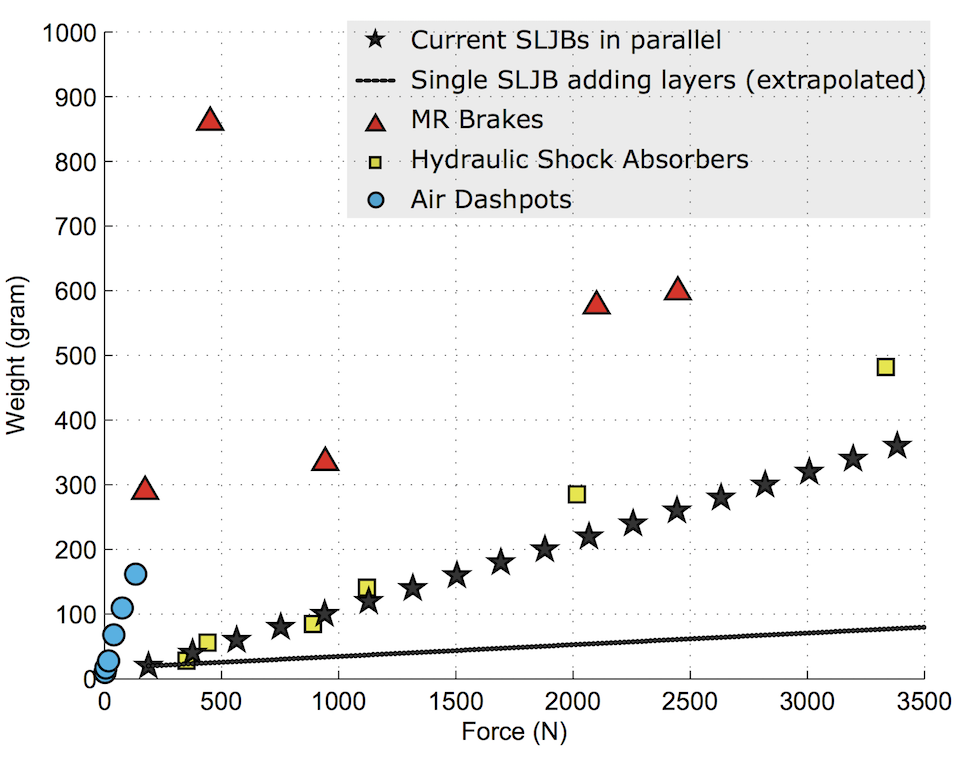
Force density (weight-force ratio) comparisons among SLJB, MR brakes, hydraulic shock absorbers, and air dashpots.
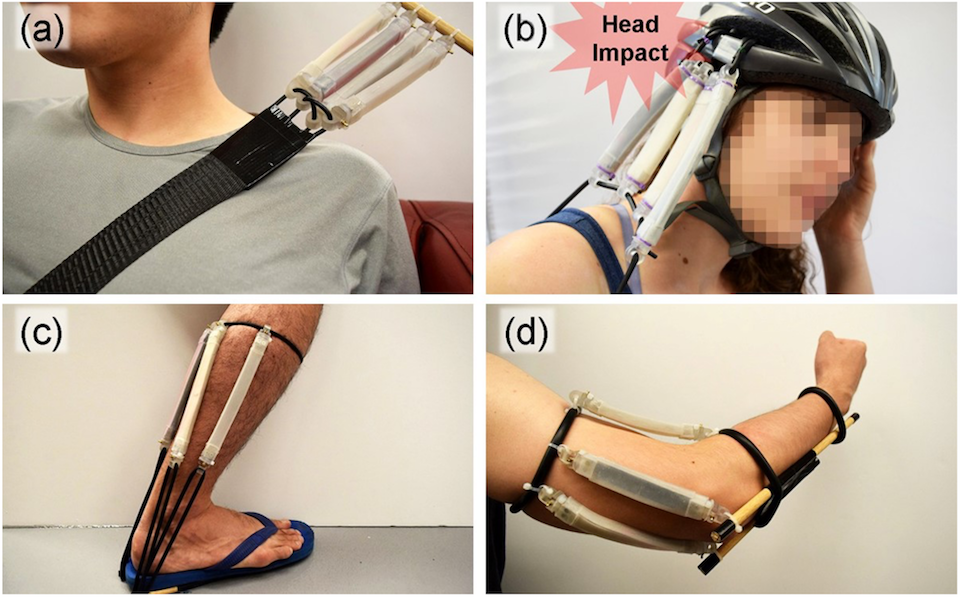
Possible applications of SLJB. (a) damping seat belt (as a damper) (b) damping neck guard connected with a helmet (as a damper) (c) ankle exoskeleton (as a clutch) (d) flexion muscle rehabilitation (as a brake).