
Wolverine, a new wearable haptic user interface for grasping in virtual reality, holding various geometric shapes.
The Wolverine is a mobile, wearable haptic device designed for simulating the grasping of rigid objects in a virtual reality interface. In contrast to prior work on wearable force feedback gloves, we focus on creating a low cost and lightweight device that renders a force directly between the thumb and three fingers to simulate objects held in pad opposition (precision) type grasps. Leveraging low-power brake-based locking sliders, the system can withstand over 100N of force between each finger and the thumb, and only consumes 0.24 mWh (0.87 joules) for each braking interaction. Integrated sensors are used both for feedback control and user input: time-of-flight sensors provide the position of each finger and an IMU provides overall orientation tracking. This paper describes the mechanical design, control strategy, and performance analysis of the Wolverine system and provides a comparison with several existing wearable haptic devices.
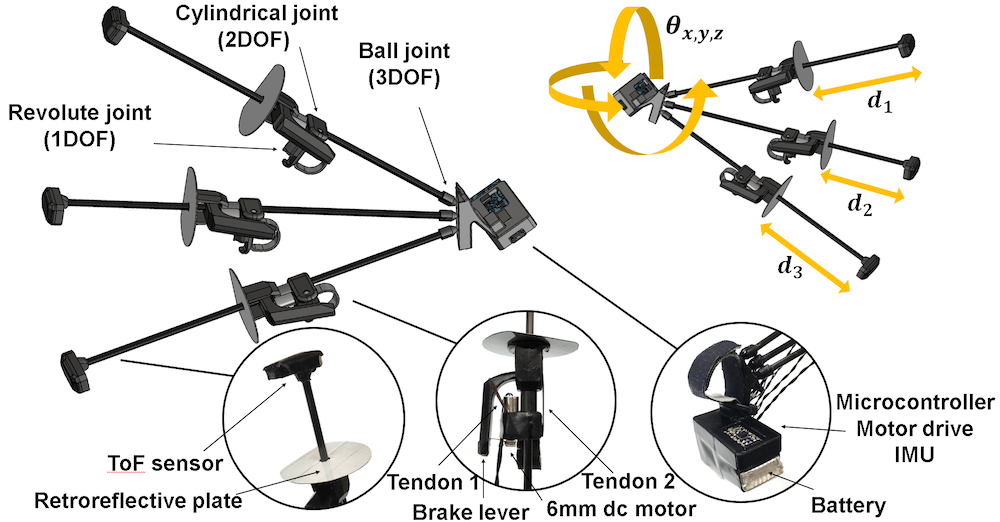
Wolverine system overview: Top Right shows the sensing degrees of freedom, Center shows the motion degrees of freedom, and Bottom shows closeup views of the individual components.
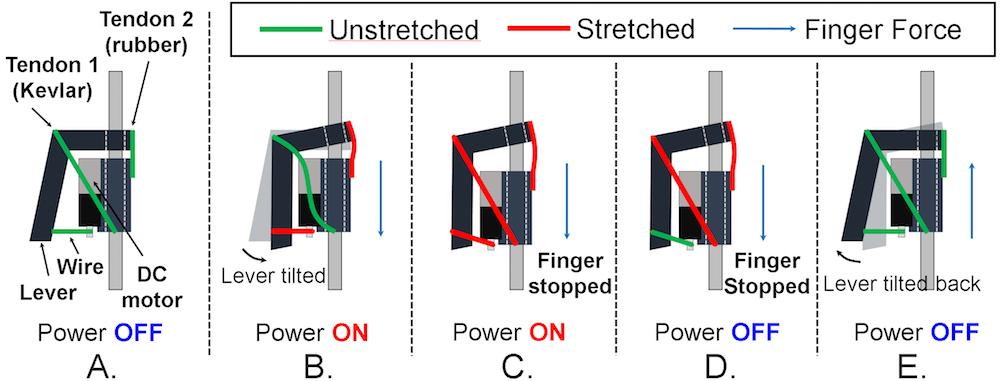
Brake mechanism. A) When the power is OFF, the lever is in the “out” position, and the hole in the lever through which the rod passes is aligned with the rod. B) When the motor is powered ON, a wire is pulled, rotating the lever to the “in” position; the rod now jams in the hole in the lever. C) As a load is applied by the user to the sliding mount, Tendon 1 becomes taut, further jamming the rod in the hole in the lever. D) Even when the power is turned OFF, the brake remains engaged due to tension in Tendon 1. E) When the user releases the squeezing force, the elastic Tendon 2 pulls the lever back into the out position, and the sliding mount is free to move away from the thumb.