- Stanford University Mechanical Engineering, 2. Stanford University Computer Science, 3. Google
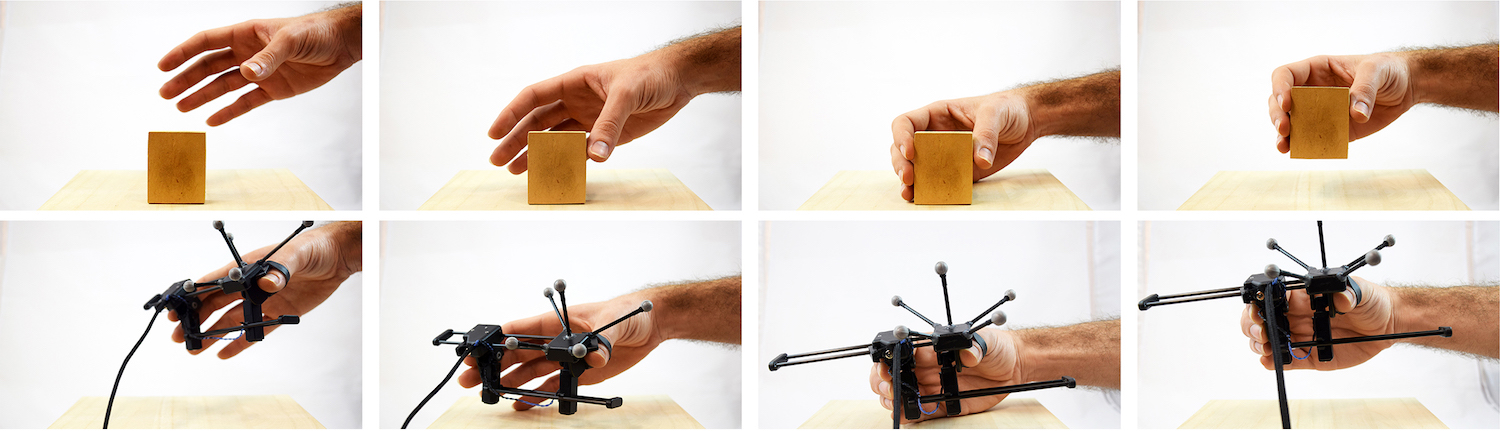
Grabity is a novel, unified design based on the combination of vibrotactile feedback, uni-directional brakes, and asymmetric skin stretch. The gripper-style haptic device can simulate grasping motions with a real object (top), in Virtual Reality (bottom). Gravity provides vibrotactile feedback during contact, high stiffness force feedback during grasping, and weight force feedback during lifting.
Ungrounded haptic devices for virtual reality (VR) applications lack the ability to convincingly render the sensations of a grasped virtual object’s rigidity and weight. We present Grabity, a wearable haptic device designed to simulate kinesthetic pad opposition grip forces and weight for grasping virtual objects in VR. The device is mounted on the index finger and thumb and enables precision grasps with a wide range of motion. A unidirectional brake creates rigid grasping force feedback. Two voice coil actuators create virtual force tangential to each finger pad through asymmetric skin deformation. These forces can be perceived as gravitational and inertial forces of virtual objects. The rotational orientation of the voice coil actuators is passively aligned with the real direction of gravity through a revolute joint, causing the virtual forces to always point downward. This paper evaluates the performance of Grabity through two user studies, finding promising ability to simulate different levels of weight with convincing object rigidity. The first user study shows that Grabity can convey various magnitudes of weight and force sensations to users by manipulating the amplitude of the asymmetric vibration. The second user study shows that users can differentiate different weights in a virtual environment using Grabity.
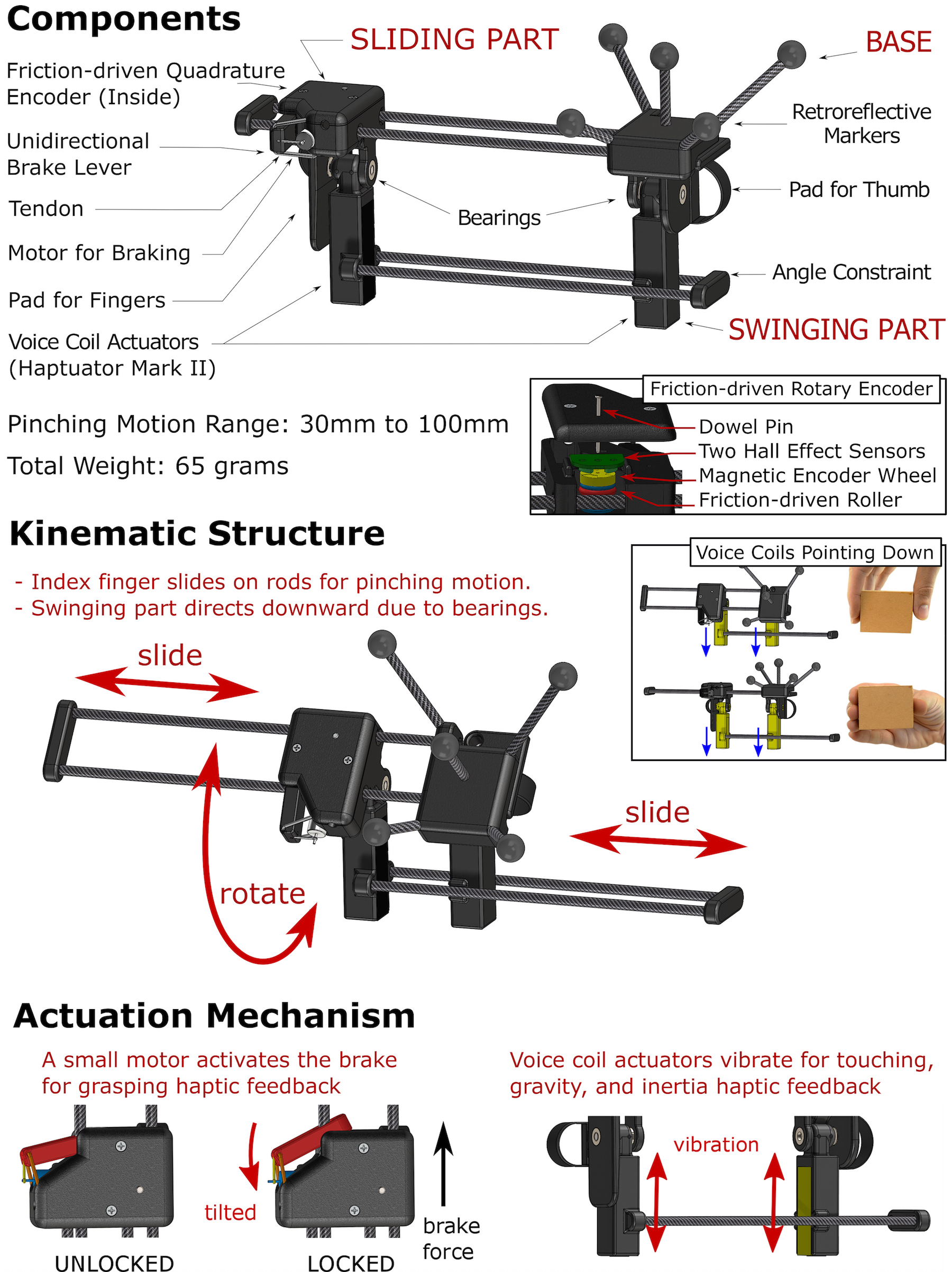
Overall mechanical structure and actuation mechanism.