Abstract
Encountered-type haptic devices (EHDs) face a number of challenges when physically embodying content in a virtual environment, including workspace limits and device latency. To address these issues, we propose REACH+, a framework for dynamic visuo-haptic redirection to improve the perceived performance of EHDs during physical interaction in VR. Us- ing this approach, we estimate the user’s arrival time to their intended target and redirect their hand to a point within the EHD’s spatio-temporally reachable space. We present an eval- uation of this framework implemented with a desktop mobile robot in a 2D target selection task, tested at four robot speeds (20, 25, 30 and 35 cm/s). Results suggest that REACH+ can improve the performance of lower-speed EHDs, increasing their rate of on-time arrival to the point of contact by up to 25% and improving users’ self-reported sense of realism.
Common Limitations
Encountered-type haptic devices face many challenges in providing proper haptic feedback. Some limitations that can lead to spatial discrepancies include:
- Workspace Constraints: Kinematic constraints limit the workspace of the EHD, making certain targets unreachable.
- Speed Limitations: Actuator limitations and safety considerations may limit EHD speed, delaying the device’s arrival to certain targets.
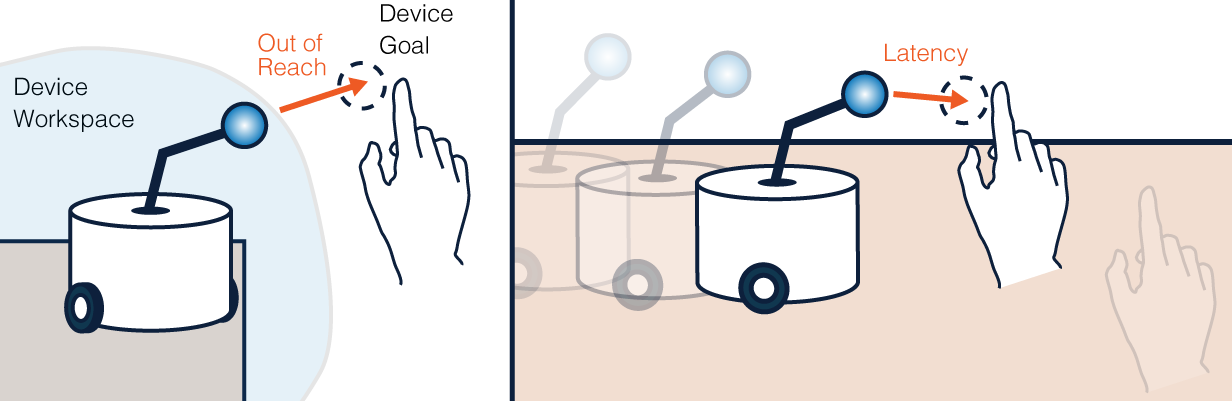
Left: The goal position (dashed) for the haptic proxy (blue) is outside the device’s workspace. Right: The device is not fast enough to arrive at the goal in time for contact.
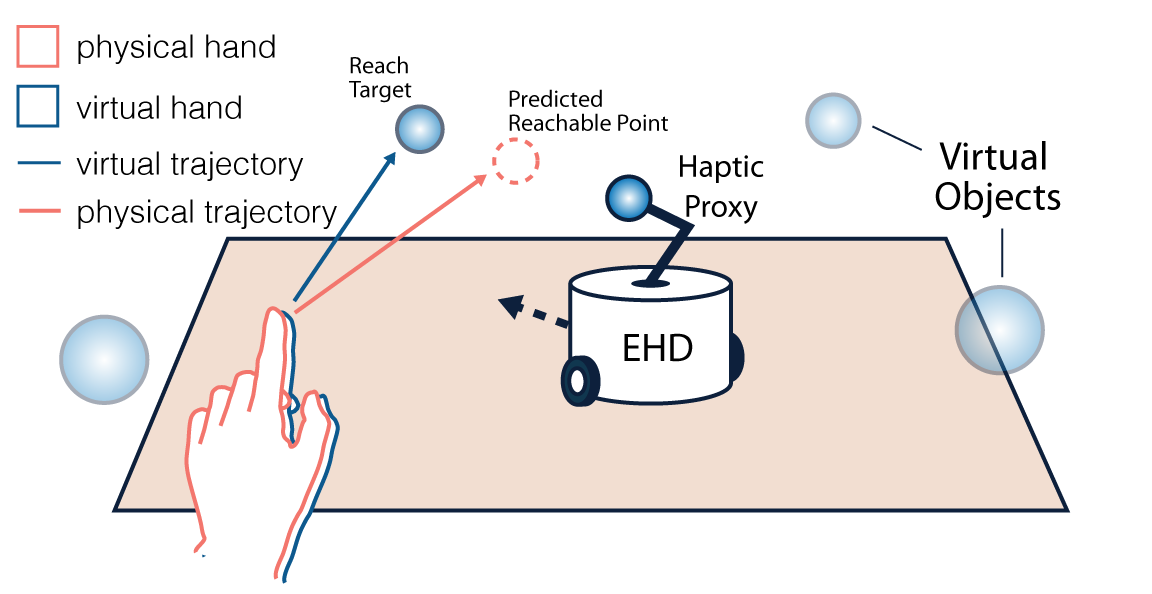
Our Solution: REACH+
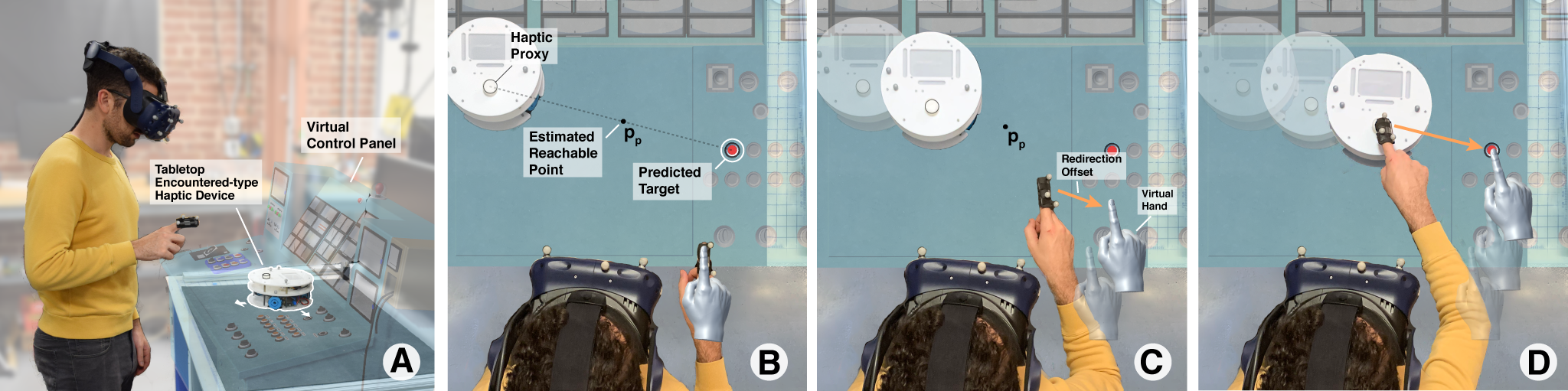
We address these issues by computing a reachable point within the device’s reachable space – calculated based on the device’s kinematics and an estimate of the user’s reach arrival time – and redirecting the user’s real hand to this point instead. In the ideal case, the user receives the proper haptic feedback from the robot, and is unaware their real and virtual hands are misaligned.
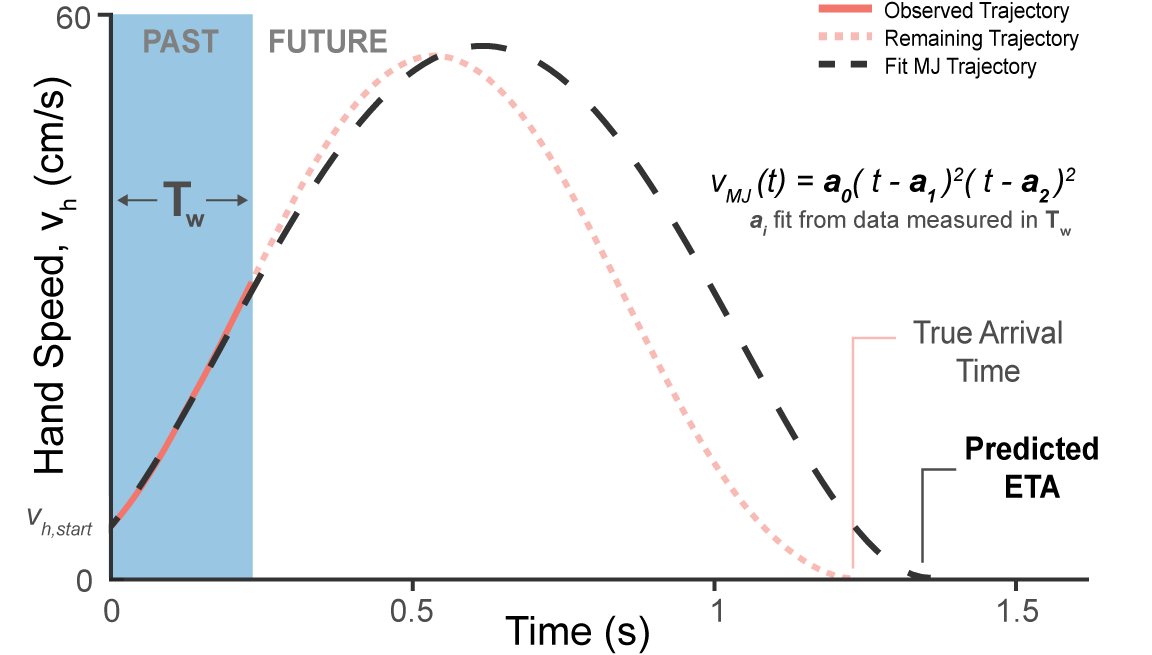
Example of ETA prediction using a Minimum Jerk (MJ) fit on measured hand speed, collected from the start of reach over a small time window (approximately 100 ms). An MJ model is then fit and predicted ETA determined.
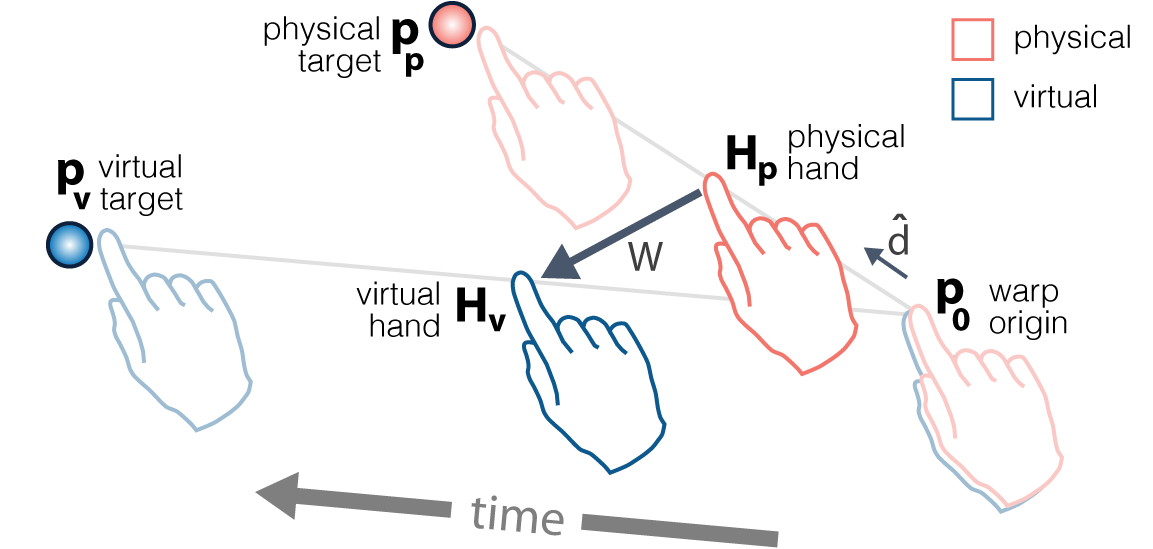
Diagram of reach redirection. At each timestep, virtual hand position is computed as a vector offset from the physical hand position, based on the hand’s displacement in the target direction.
Based on the predicted ETA and the known workspace of the device, we compute a reachable point which the device is likely able to arrive at in time for contact. We then set this point as the new device position goal and redirect the user’s hand to this point.