We introduce SwarmHaptics, a new type of haptic display using a swarm of small, wheeled robots. These robots move on a flat surface and apply haptic patterns to the user’s hand, arm, or any other accessible body parts. We explore the design space of SwarmHaptics including individual and collective robot parameters, and demonstrate example scenarios including remote social touch using the Zooids platform. To gain insights into human perception, we applied haptic patterns with varying number of robots, force type, frequency, and amplitude and obtained user’s perception in terms of emotion, urgency, and Human-Robot Interaction metrics. In a separate elicitation study, users generated a set of haptic patterns for social touch. The results from the two studies help inform how users perceive and generate haptic patterns with SwarmHaptics.
Design Space of SwarmHaptics
Here, we explore the design space for a haptic display with swarm robots. Specifically a group of simple, mobile robots with no end-effector is chosen because it is one of the most rudimentary type of robots. Thus, the resulting design space can be more generalizable to other mobile robots. We first investigate the design space for a haptic display with a single robot, then broaden the scope to include a swarm of robots.
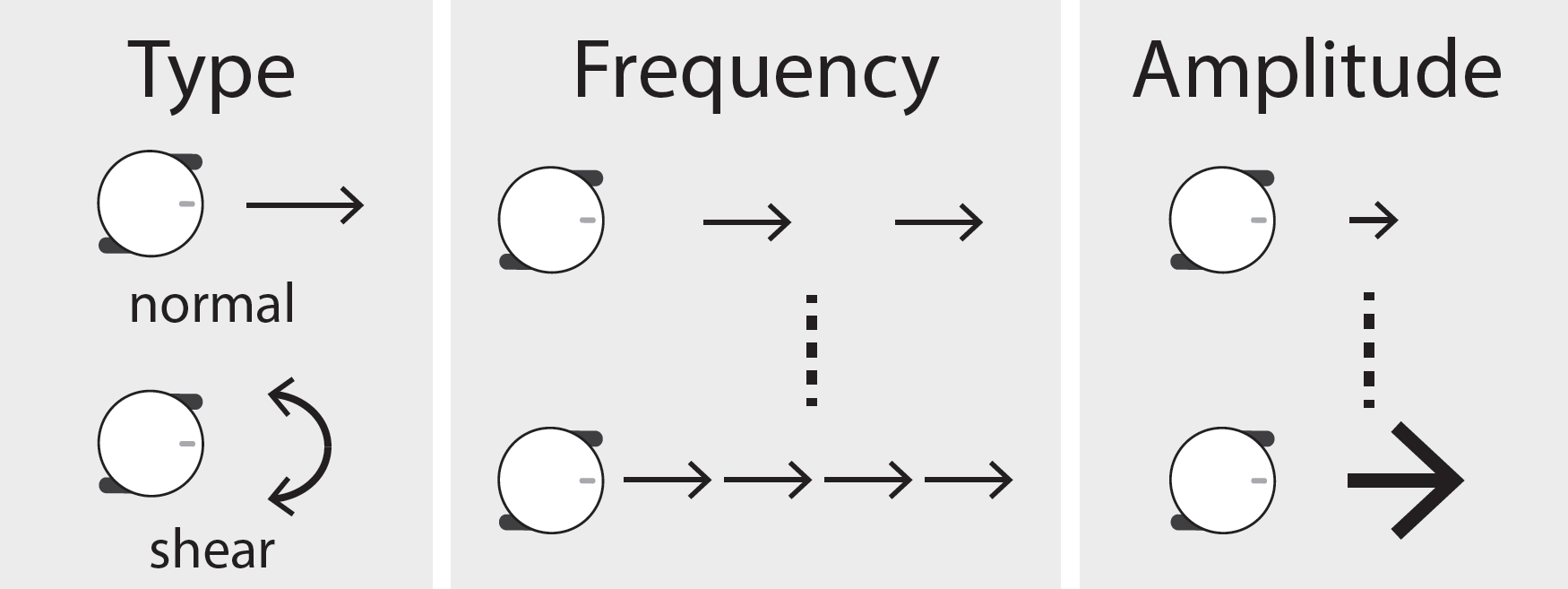
Haptic Parameters for a Single Robot
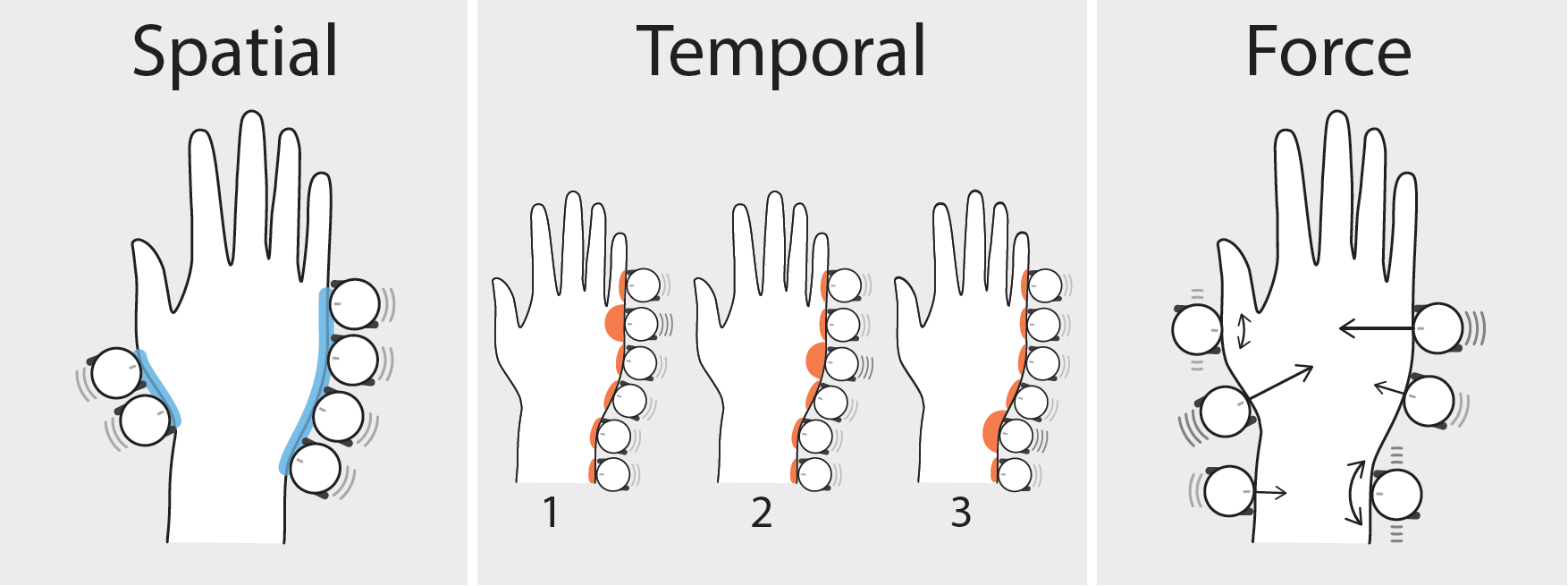
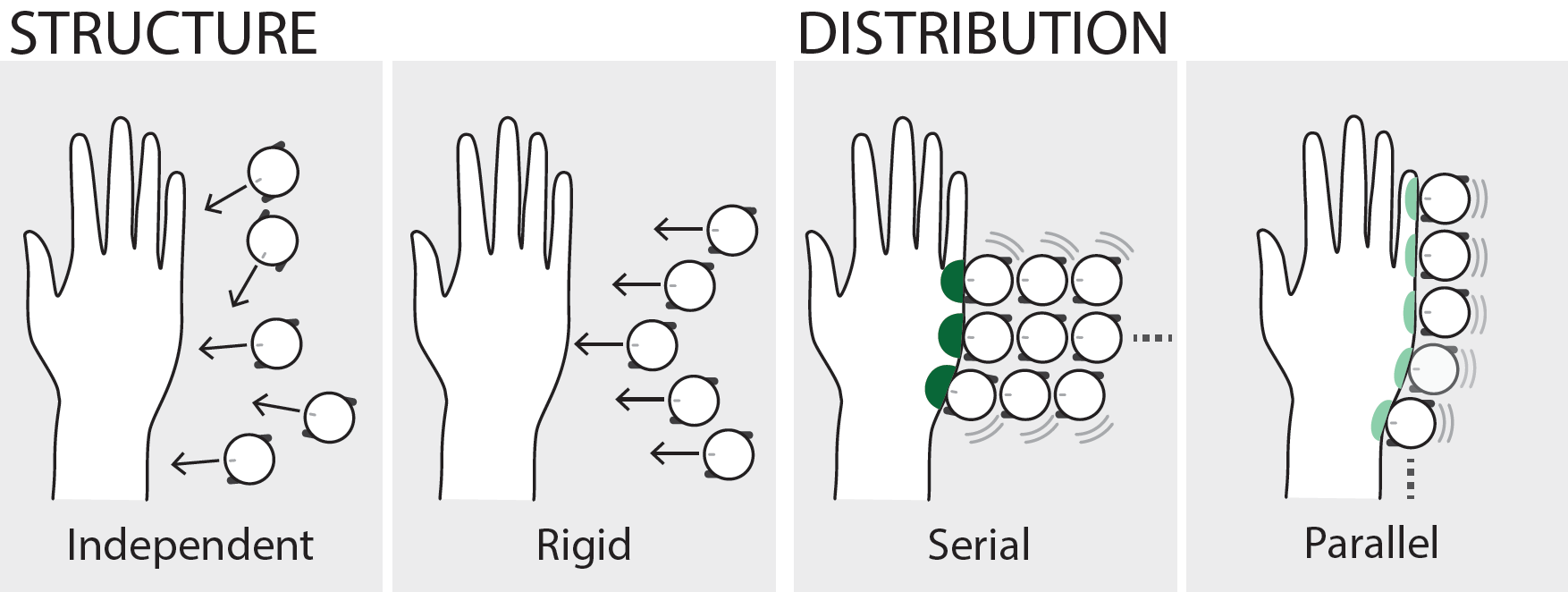
Haptic Parameters for a Swarm of Robots
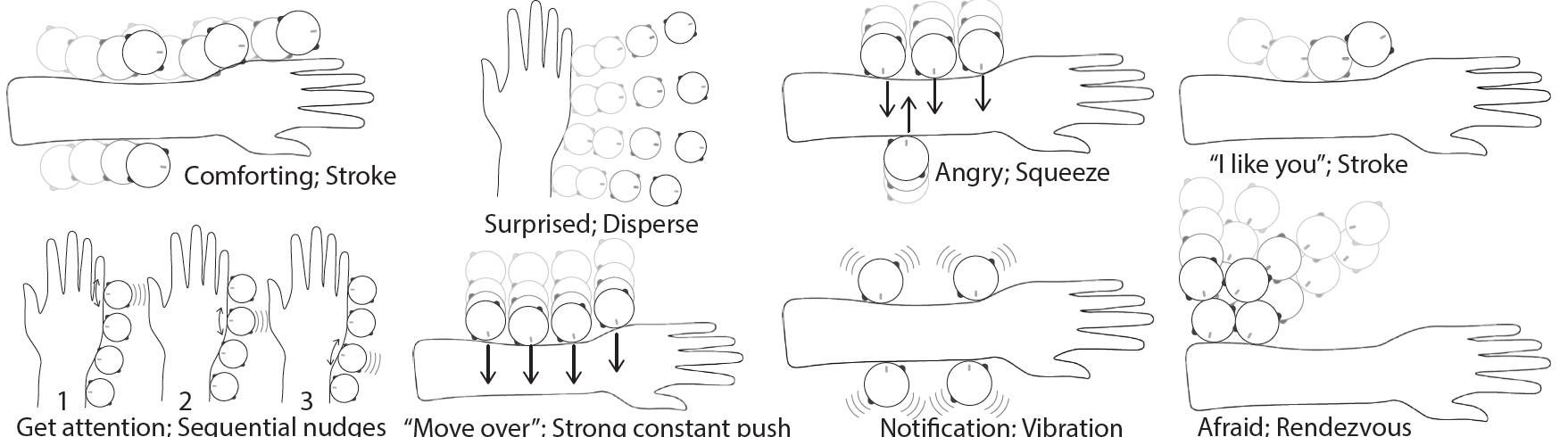
Example Scenarios
Here we demonstrate several example scenarios of how \systemname can be used in real life situations.
Notification
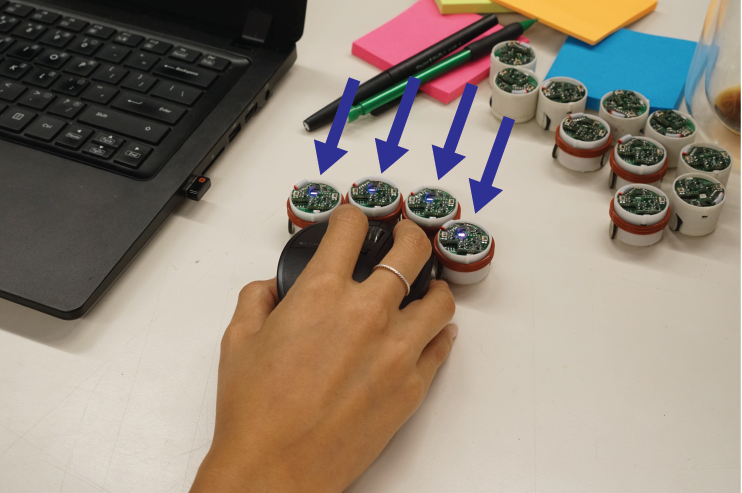
SwarmHaptics can be used to notify users through touch. This can be especially useful when the other primary senses, visual and audio, are occupied by other mediums.
Directional Cue
SwarmHaptics can be used to convey directional cues to the user.
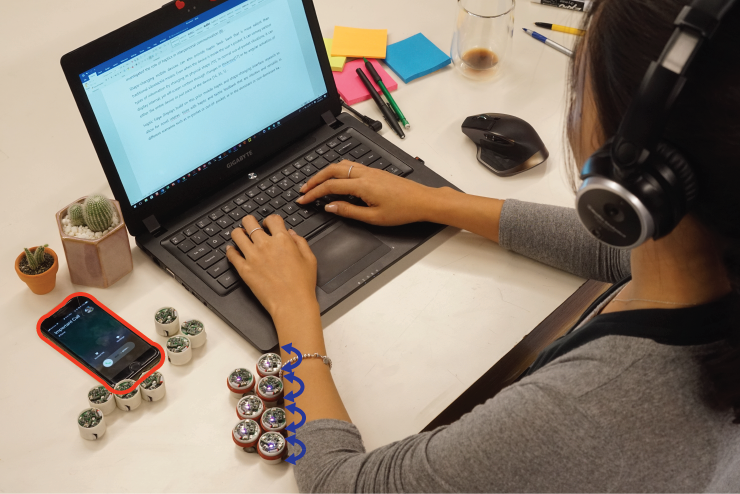
Remote Social Touch
SwarmHaptics can be used to convey social touch to a remote person.
User Perception Study
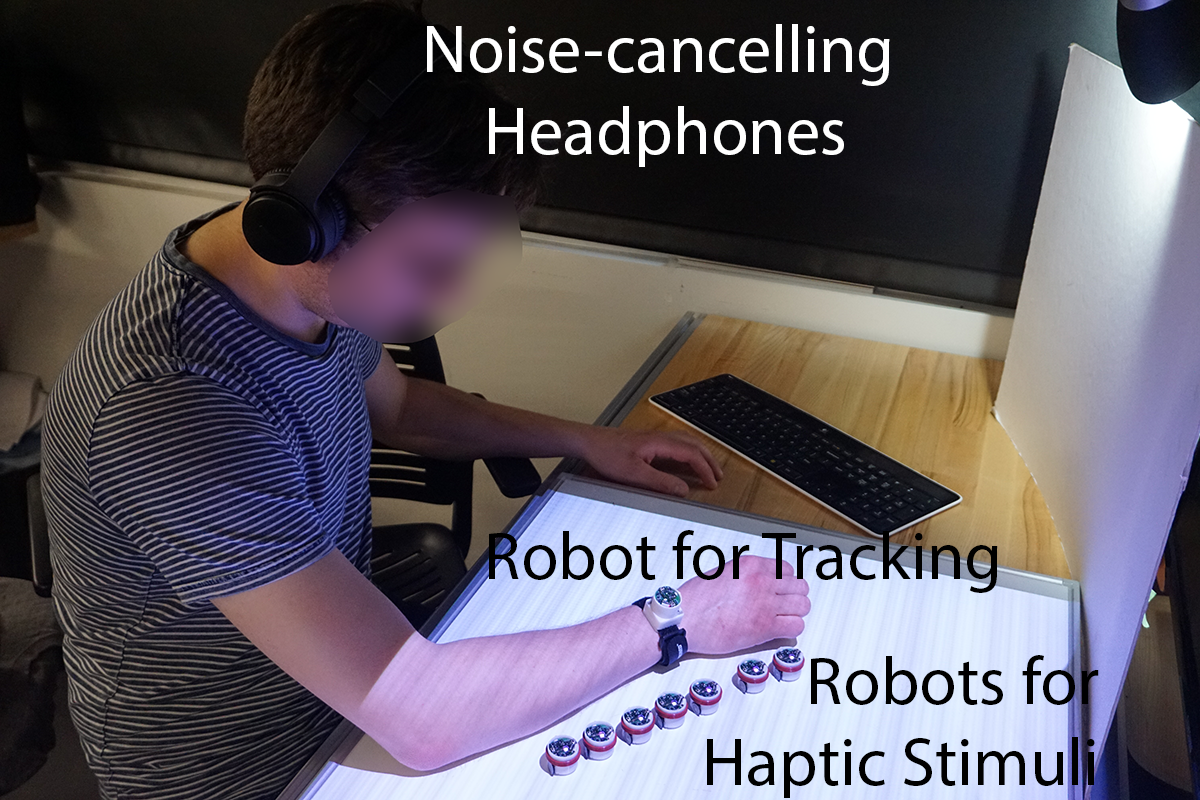
To properly design the haptic patterns from SwarmHaptics, we first need to understand how people perceive different haptic stimuli from the robots. We first begin by studying the effects of the fundamental parameters such as force type, frequency, and amplitude with varying number of robots. Other elements of our design space such as spatial, temporal, and force coordinations build on the fundamental parameters and we plan on investigating them in the future.
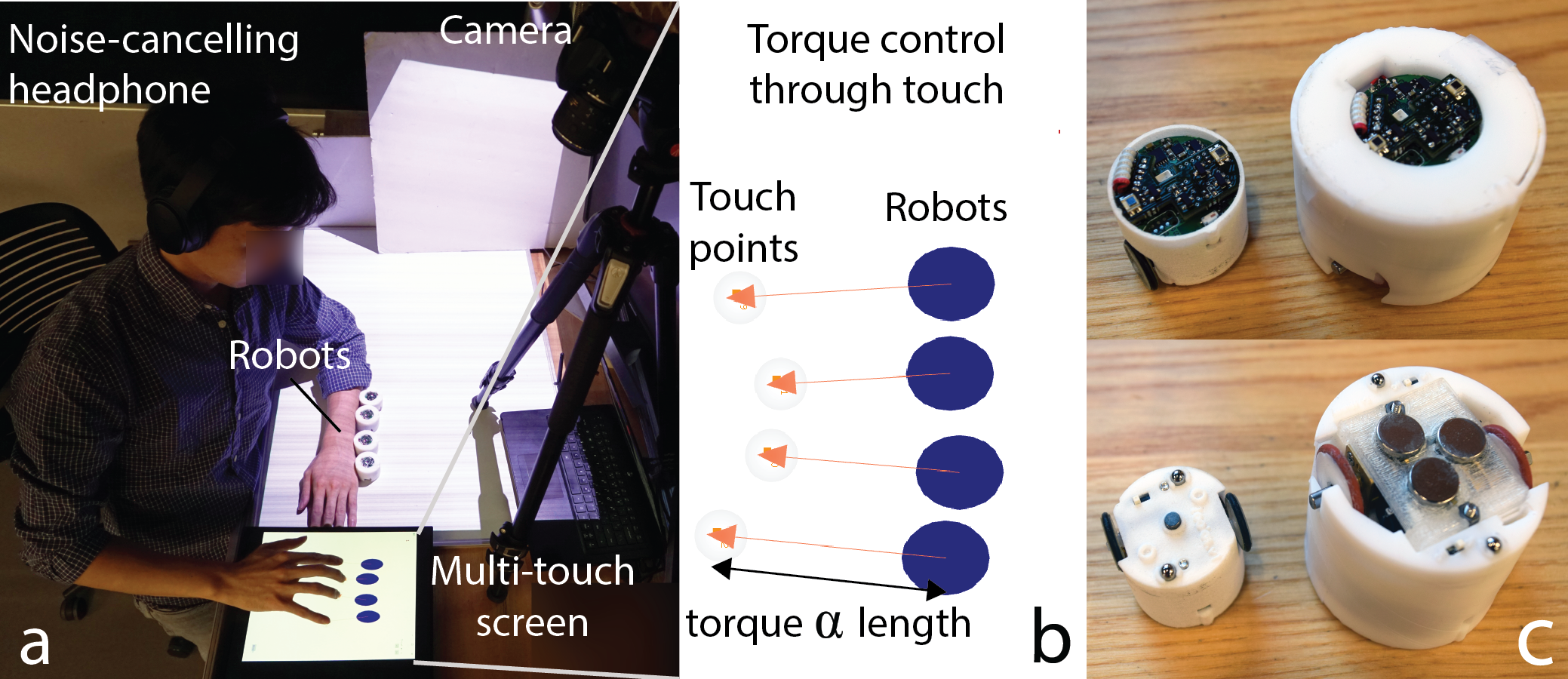
Setup
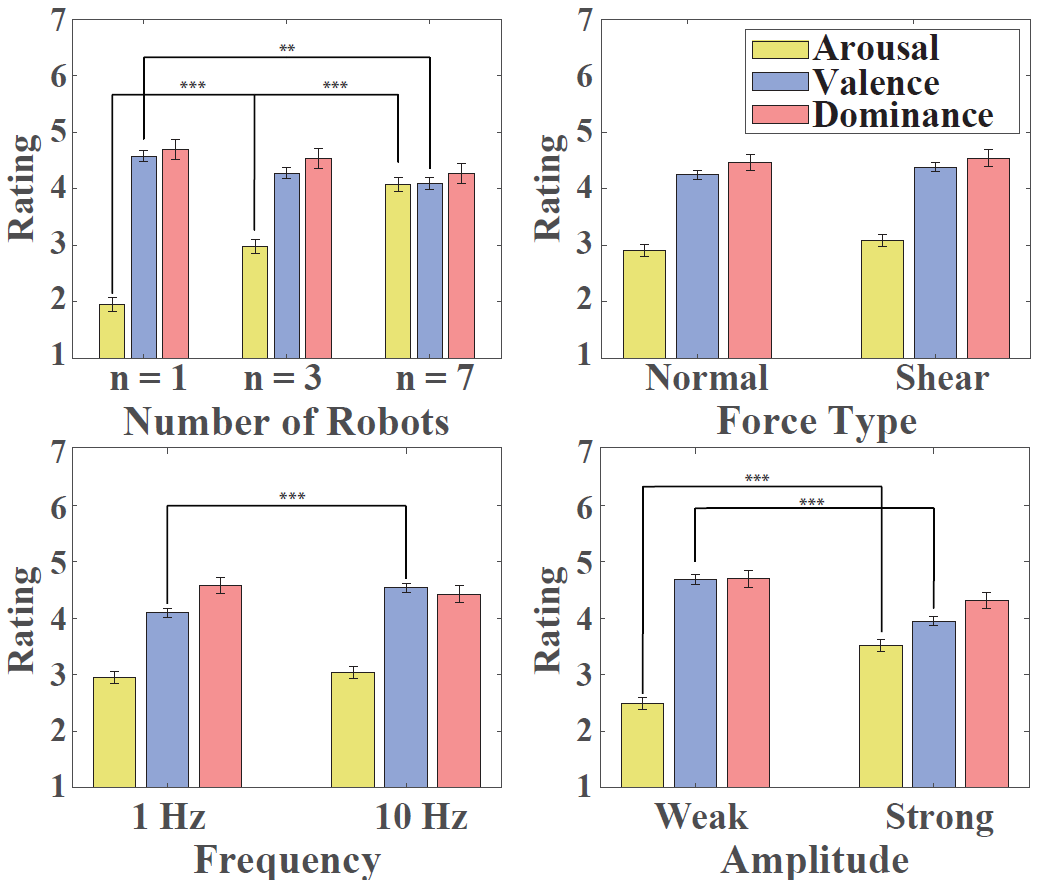
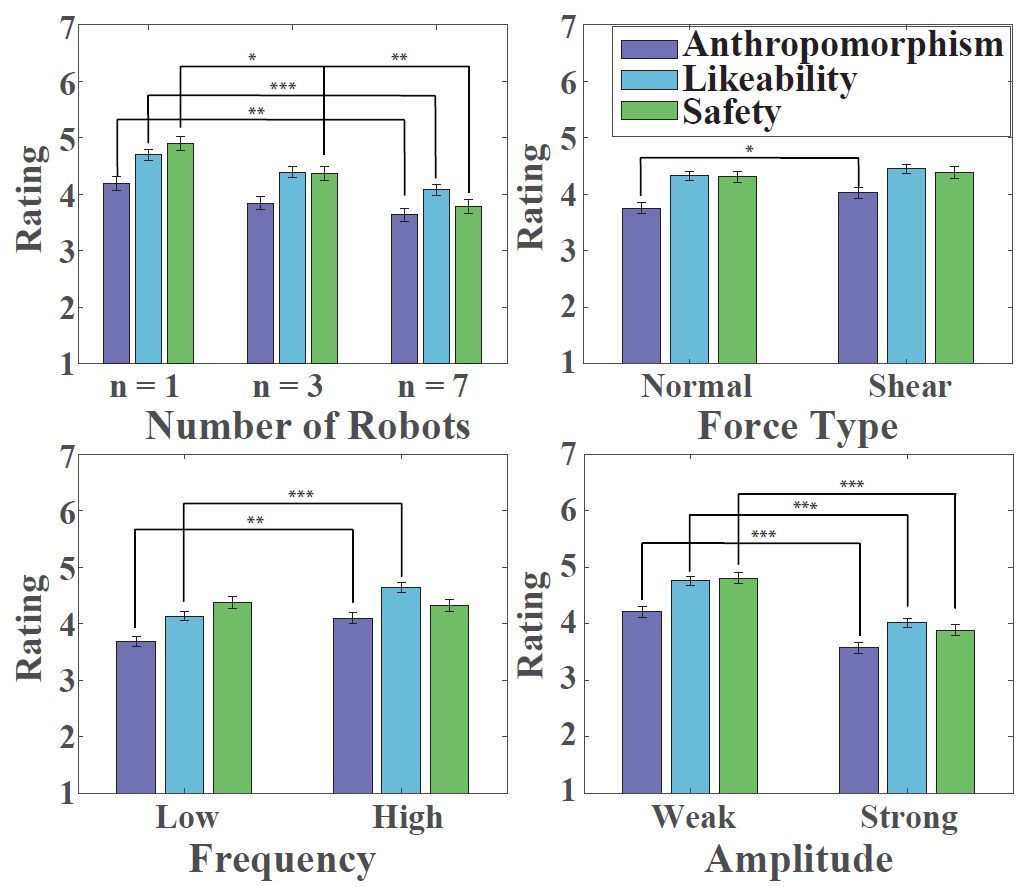
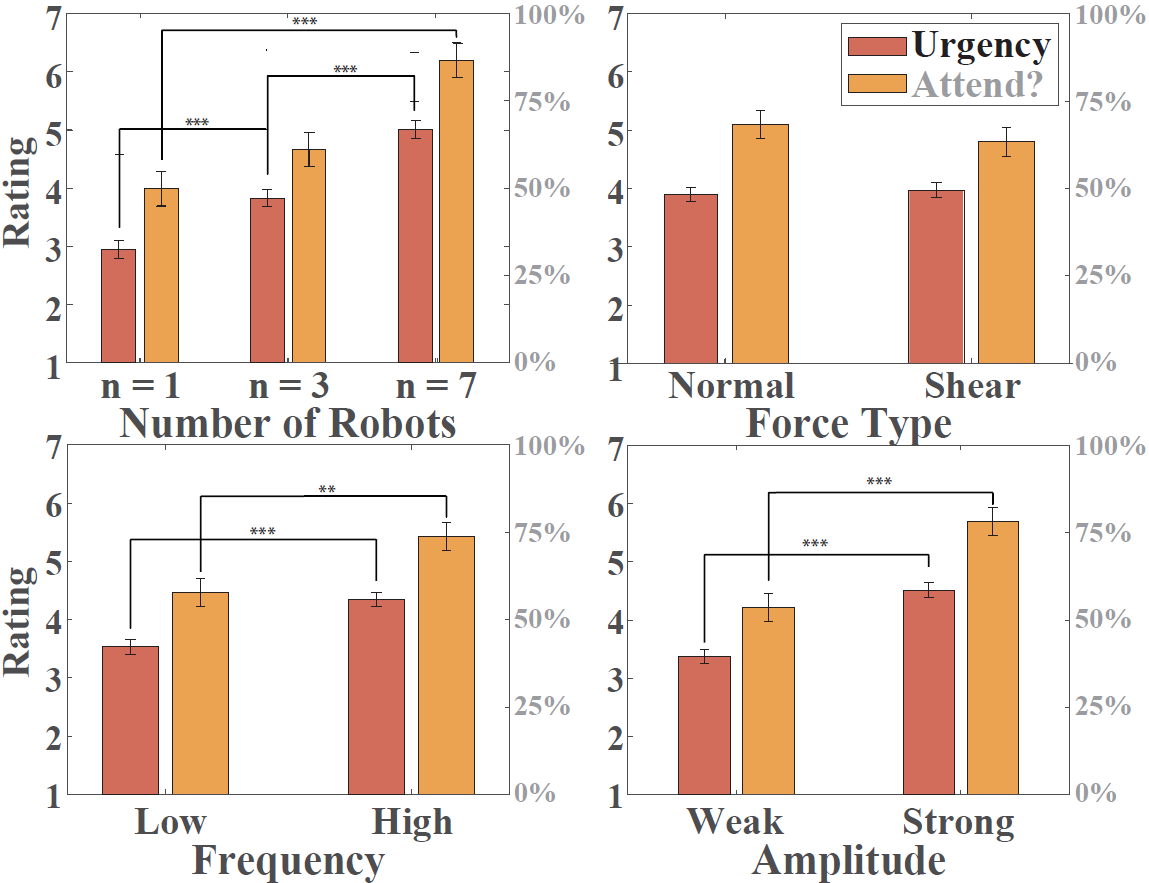
Results
Emotion
HRI
Urgency
Social Touch Elicitation Study
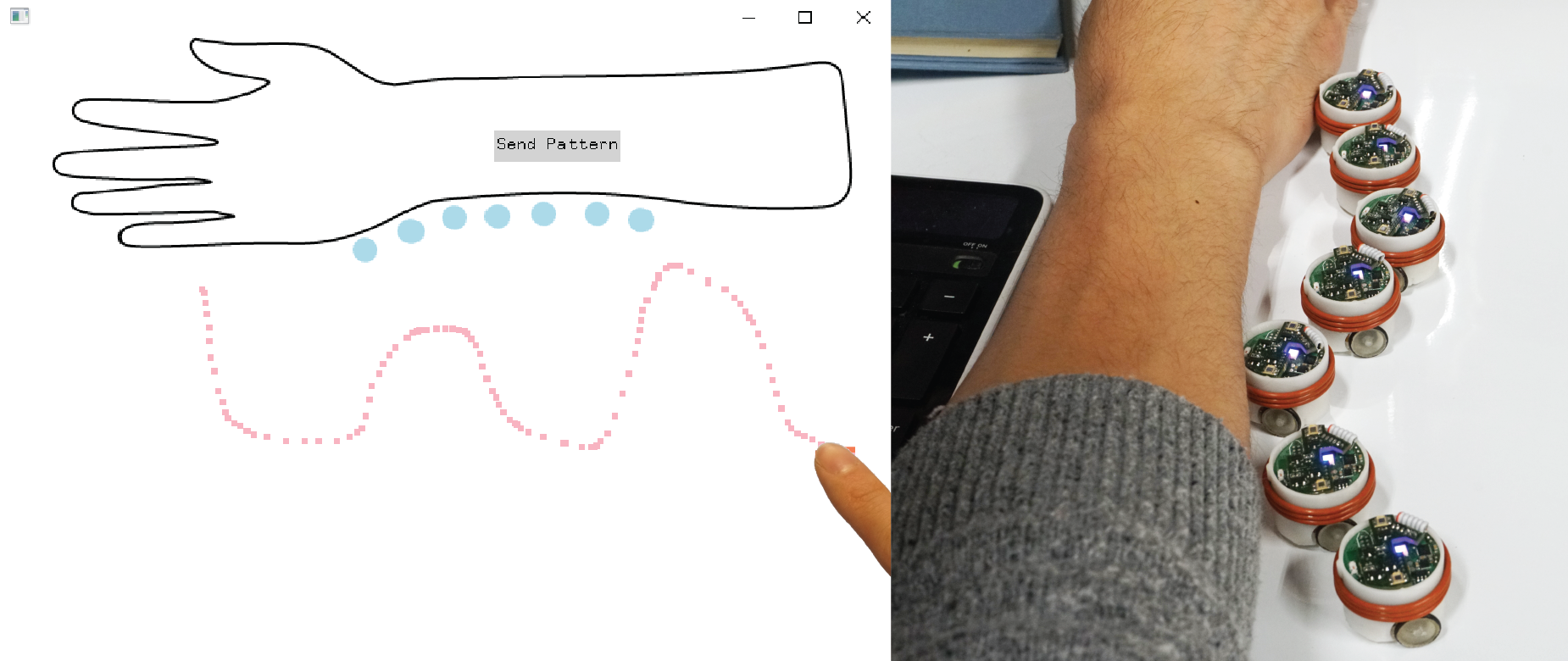
In the earlier study, we evaluated human perception of various simple haptic patterns. To generate more expressive patterns specifically for social touch with different spatial, temporal, and force coordinations, we had the participants brainstorm haptic patterns through an elicitation study.
Setup
Results