Abstract
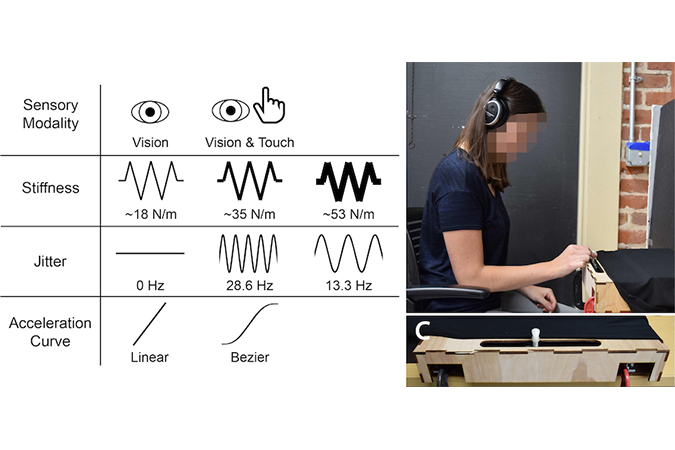
Humans can perceive motion through a variety of different modalities. Vision is a well explored modality; however haptics can greatly increase the richness of information provided to the user. The de- tailed differences in perception of motion between these two modalities are not well studied and can provide an additional avenue for communication between humans and haptic devices or robots. We analyze these differences in the context of users interactions with a non-anthropomorphic haptic device. In this study, participants experienced different levels and combinations of stiffness, jitter, and acceleration curves via a one degree of freedom linear motion display. These conditions were presented with and without the opportunity for users to touch the setup. Participants rated the experiences within the contexts of emotion, anthropomorphism, likeability, and safety using the SAM scale, HRI metrics, as well as with qualitative feedback. A positive correlation between stiffness and dominance, specifically due to the haptic condition, was found; additionally, with the introduction of jitter, decreases in perceived arousal and likeability were recorded. Trends relating acceleration curves to perceived dominance as well as stiffness and jitter to valence, arousal, dominance, likeability, and safety were also found. These results suggest the importance of considering which sensory modalities are more actively engaged during interactions and, concomitantly, which behaviors designers should employ in the creation of non-anthropomorphic interactive haptic devices to achieve a particular interpreted affective state.
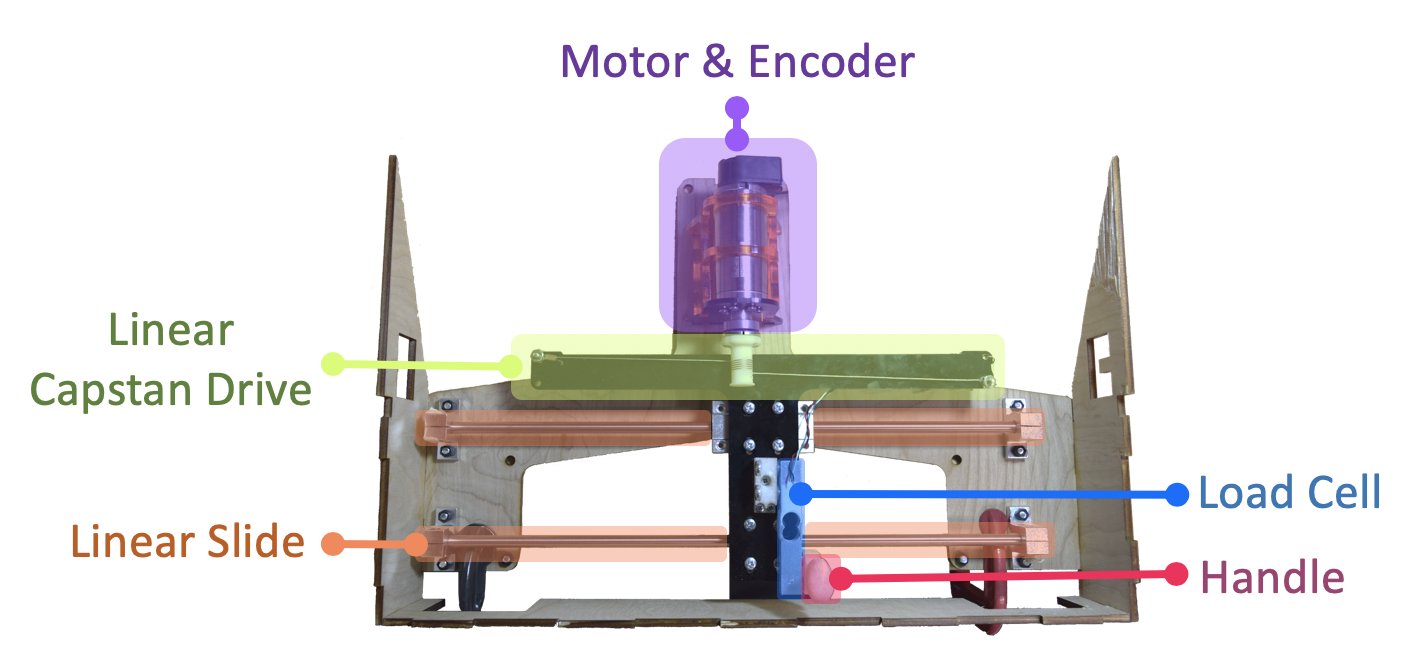
Device