SHAPE Lab @ UIST
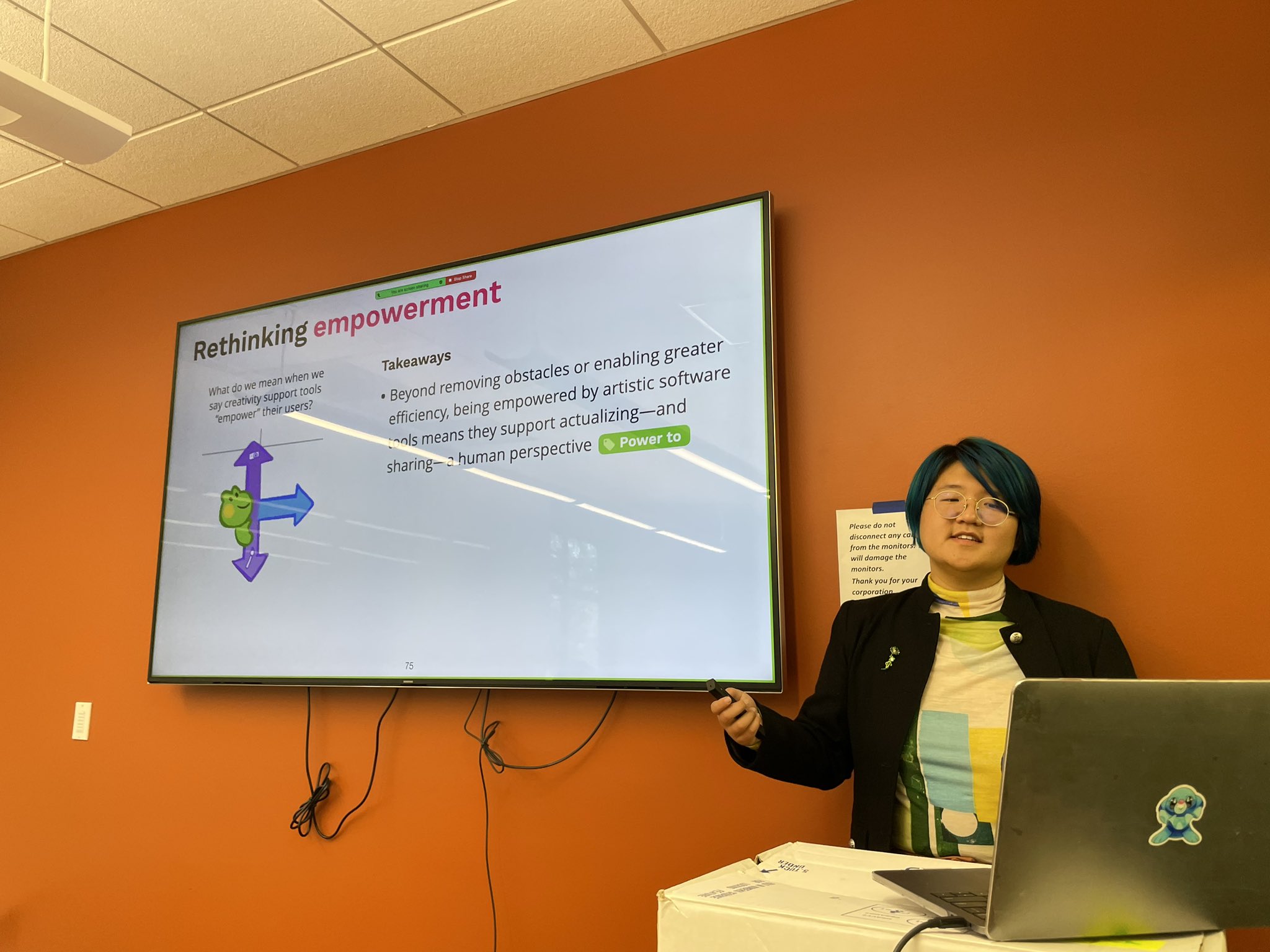
Amazing week at UIST 2023 in San Francisco! Jingyi presenting new work on “Power as a Lens for Creativity Support Tools”!

SHAPE Lab @ UIST exploratorium banquet

Sean & Jeff Han giving opening remarks
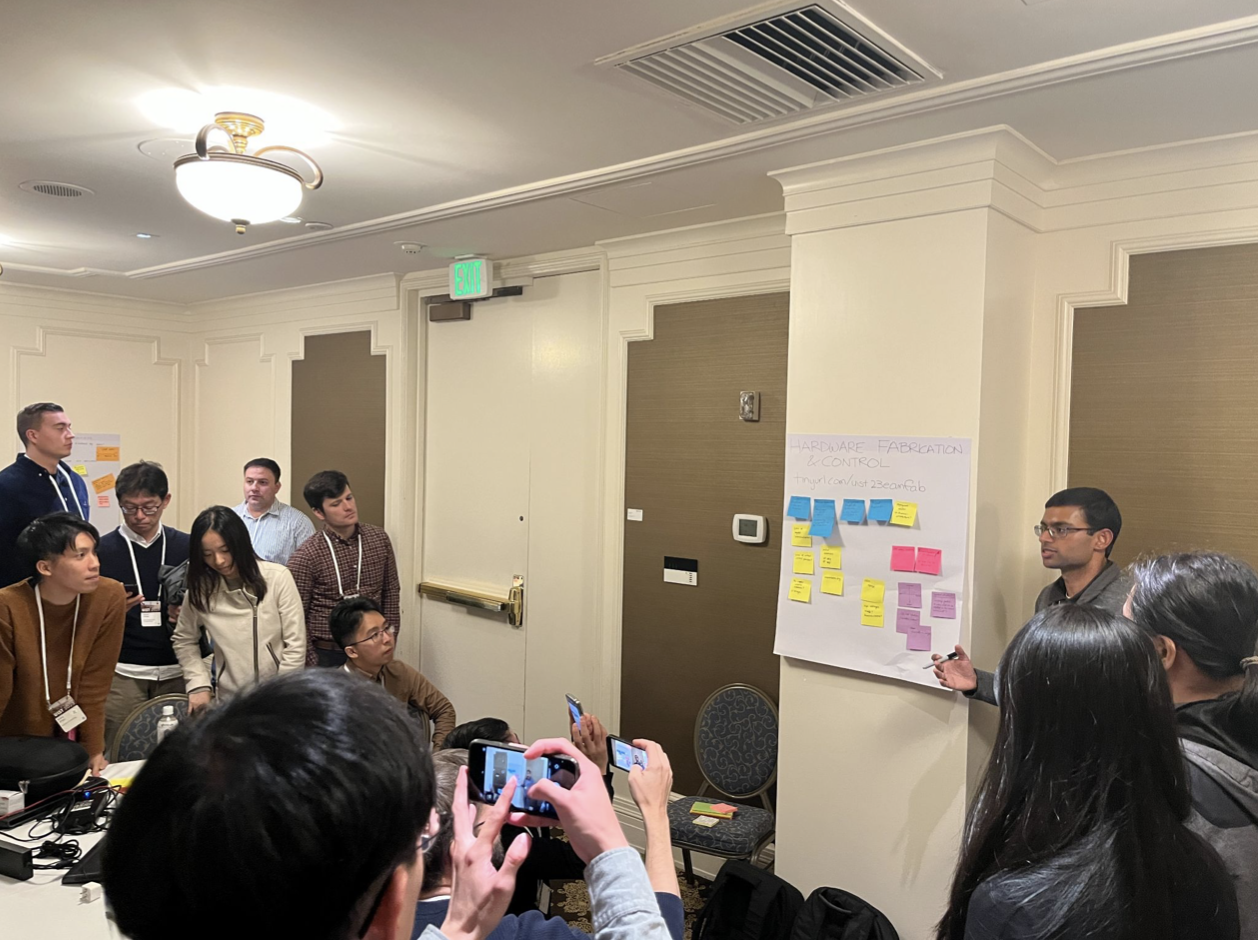
Ahad co-hosting workshop on electro-actuated materials & haptics
HCI Retreat @ Santa Cruz
HCI Group went to Santa Cruz for summer retreat. Insightful discussions, networking and some fun time at Santa Cruz Boardwalk!

group photo!

discussion time
Jingyi's Ph.D. Defense
Congratulations to Jingyi Li on successfully defending their dissertation! Jingyi defended their doctoral thesis titled, ‘Rethinking power dynamics in software tools for artists’.
they passed!

congrats to all graduates!
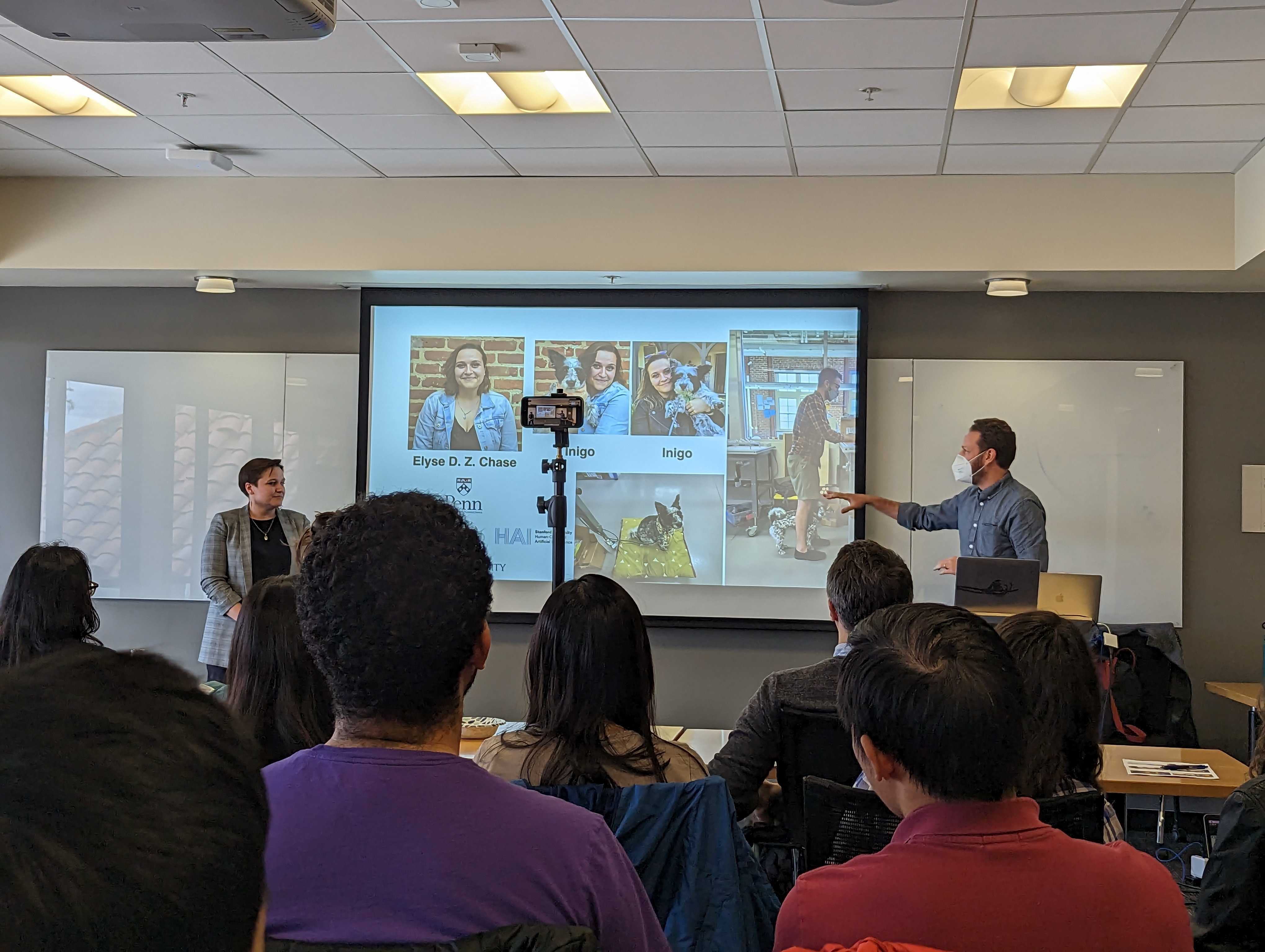
Elyse's Ph.D. Defense
Congratulations to Elyse Chase on successfully defending her dissertation! Elyse defended her doctoral thesis titled, ‘In Touch with Causation: The Role of Haptics in Multisensory Phenomenal Causality’.
she passed!

Elyse presenting new work at World Haptics Conference!
SURI Poster Session
Our summer undergraduate researchers in Mechanical Engineering shared their posters today! It was wonderful having them in lab this summer and we were excited for them to get to present on their work.
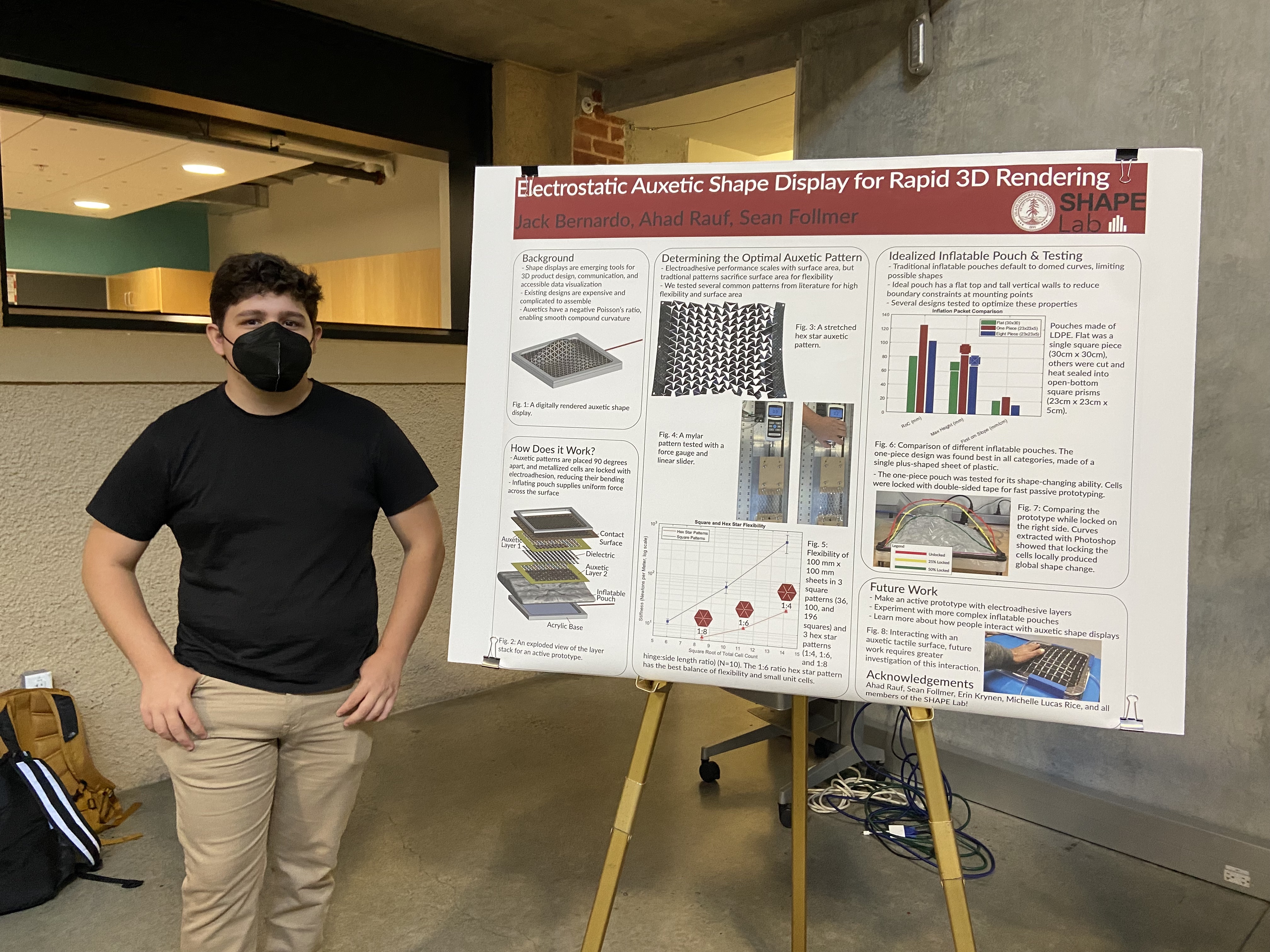
jack
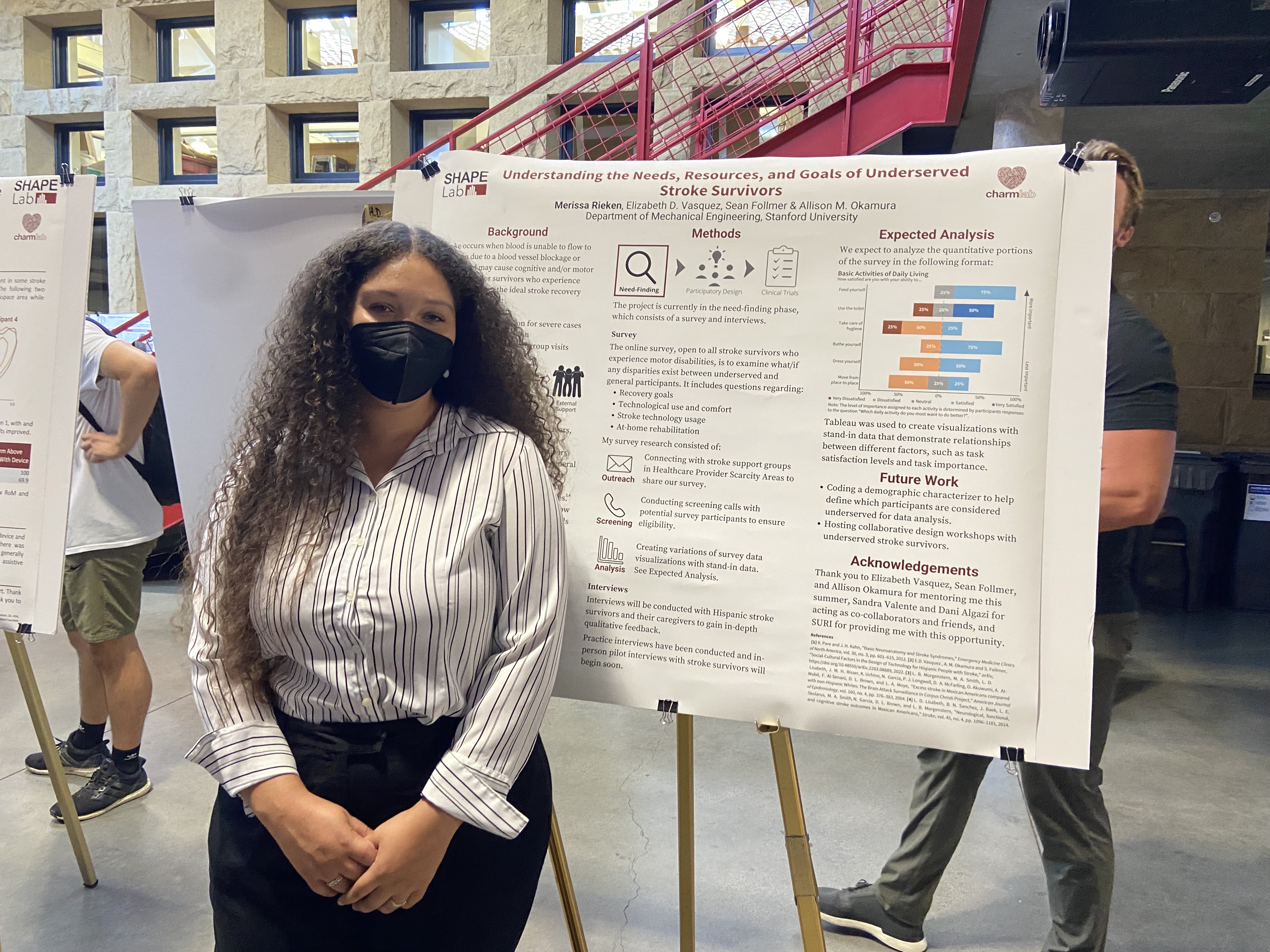
merissa
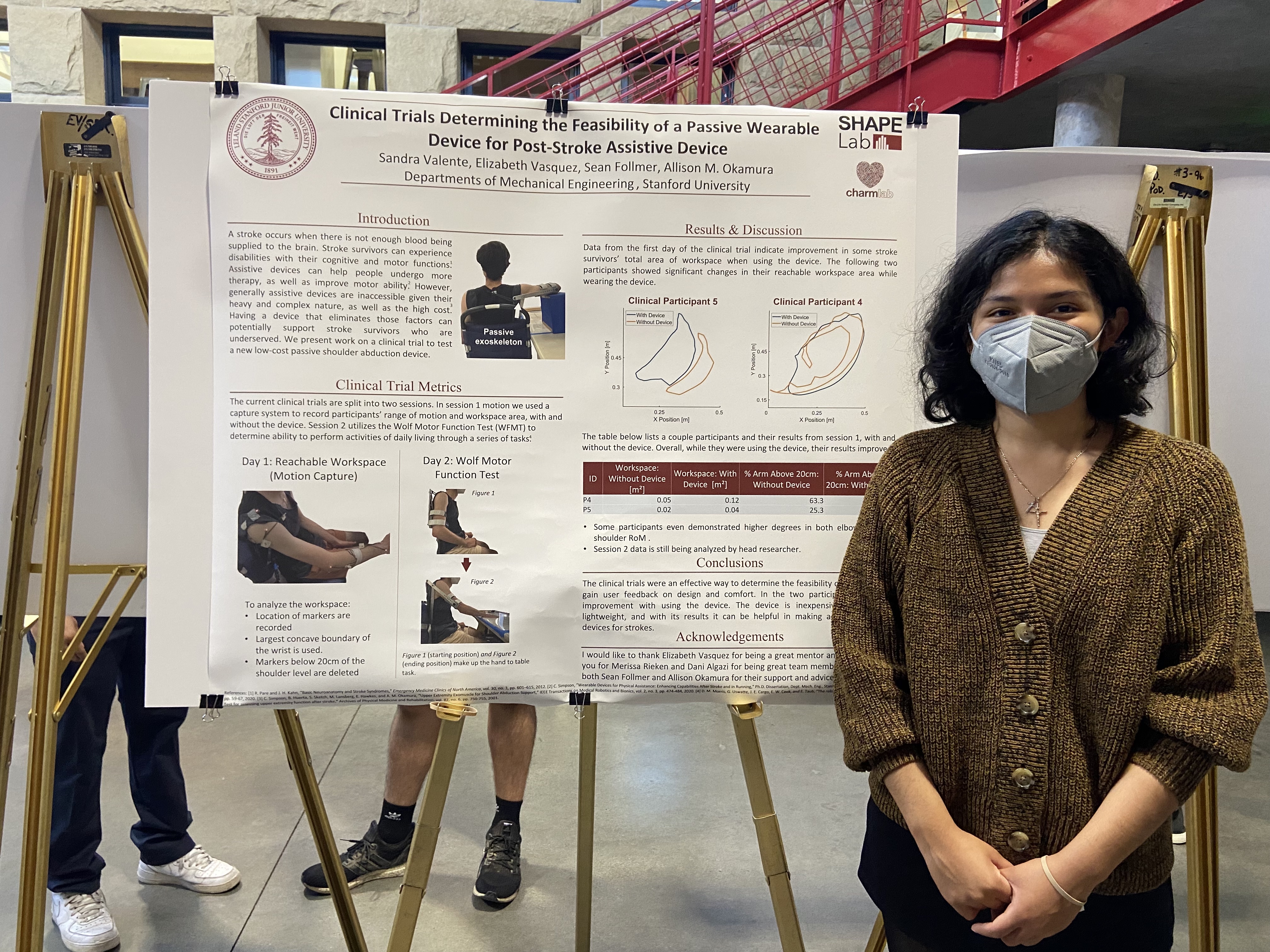
sandra
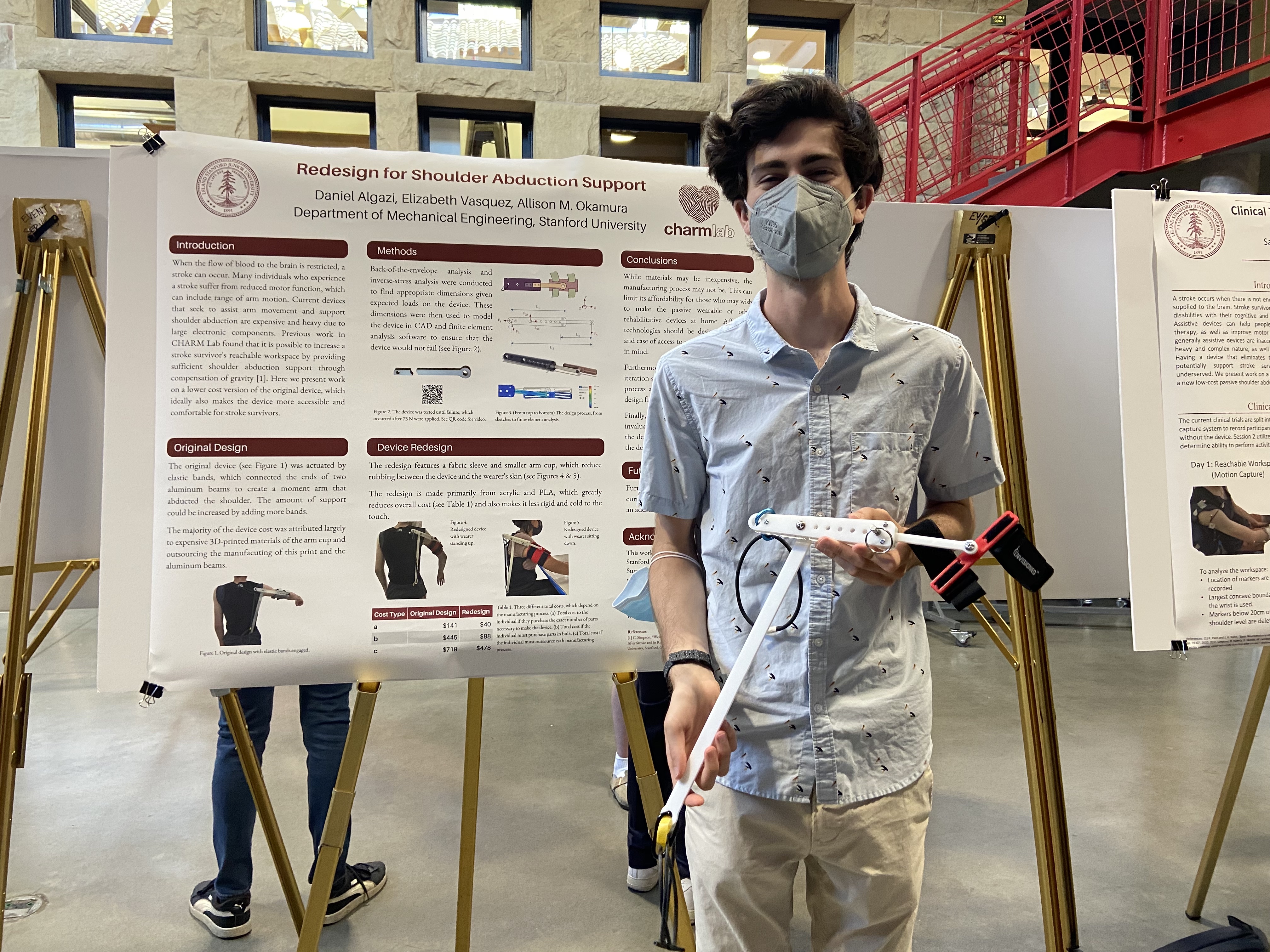
dani
Archives
- SHAPE Lab @ UIST
- HCI Retreat @ Santa Cruz
- Jingyi's Ph.D. Defense
- Elyse's Ph.D. Defense
- SURI Poster Session
- Eric's PhD Defense
- Shape Camp
- Parastoo's PhD Defense
- HCI Retreat
- Alexa's PhD Defense
- Zack's PhD Defense
- Zack featured in Veritasium Video
- Sean wins the Sloan Research Fellowship
- Evan's PhD Defense
- Kai's PhD Defense
- An untethered isoperimetric soft robot
- Lawrence's PhD Defense
- Zack, Nathan, and Sean present at BARS
- Increasing access to 3D modeling through touch-based display
- Dr. Choi: shape lab's first PhD alumni
- HOW TO BUILD YOUR OWN SAFE-TO-TOUCH DRONE CAGE
- Happy End of 2018!
- shapeShift honorable mention at the 2018 Fastco Design Awards
- 2018 Retreat
- CHI 2018
- shapeShift on WSJ
- Haptics Symposium 2018
- Happy End of 2017!
- Awards @UIST 2017
- New publication to ISS 2017
- Meet UbiSwarm
- Zooids featured in Fastco Design
- TTL In Review (2016-2017)
- 2017 Retreat
- shape lab goes to ICRA'17
- spaghetti lunch
- Many Awards @UIST 2016
- MECON 2016
- Shape-shifting tech will change work as we know it